
 Technology peripherals
AI
Can a robot dog learn to walk in one hour? Mimicking animal instincts, research published in Nature sub-journal
Technology peripherals
AI
Can a robot dog learn to walk in one hour? Mimicking animal instincts, research published in Nature sub-journal
Can a robot dog learn to walk in one hour? Mimicking animal instincts, research published in Nature sub-journal

According to foreign media Tech Xplore, the Max Planck Institute for Intelligent Systems (MPI-IS) in Stuttgart, Germany, invented a small four-legged robot dog named Morti. Learn how to walk on your own.
The paper "Learning Plastic Matching of Robot Dynamics in Closed-loop Central Pattern Generators" illustrating this technology was published in "Learning Plastic Matching of Robot Dynamics in Closed-loop Central Pattern Generators" on July 18 Published in the journal Nature Machine Intelligence, the first author of the paper is Felix Ruppert.
Rupert said: "The robot dog Morti we studied has the same reflexes as animals and can learn how to walk independently from failures."
▲Robotic Dog Morti
1. Get up after falling, Morti can imitate animal learning
There is a nerve called CPG (Central Pattern Generator) in the spinal cord of humans and animals meta network. CPG can help organisms complete rhythmic tasks such as walking, blinking or digestion. This network of neurons can produce periodic muscle contractions without input from the brain.
Rupert installed a virtual spinal cord on Morti's back to simulate the effects of CPG, and installed a sample database in this virtual spinal cord. When Morti walks smoothly, the sensor data on the robot's feet are constantly compared with the data in the CPG sample library to provide a suitable walking posture.
If the robot falls, the learning algorithm optimizes the way it walks by changing the distance and speed at which the legs swing back and forth. During the machine learning process, CPG will send some adaptive motion signals to make the robot walk more smoothly. The core of this machine learning process is to change the output signal of the CPG and monitor under what circumstances the machine will encounter stumbling.
▲Morti optimizes walking based on feedback data
Morti imitates the process of small animals learning to walk. They only find the most effective way after falling continuously. How to use muscles and learn to walk. Rupert said that at first, Morti would fall over, but after about an hour, the algorithm would help Morti find the best way to walk. Rupert also said: "Currently my team is adding more sensors to Morti to expand Mortimer's range of movement. We want to make Morti more like an animal."
2. Efficient and energy-saving, Morti can walk for one hour Afterwards, the energy consumption is reduced by 42%
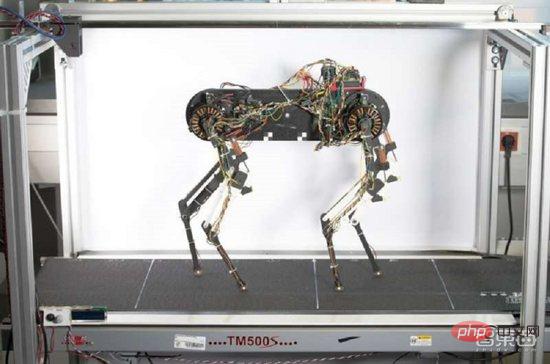
To walk the same distance, most industrial quadruped robots currently require tens or hundreds of watts of power, but Morti only consumes 5 watts of power.
This is because on the one hand, industrial quadruped robots have a larger volume and weight and require more power to support their movements, and on the other hand, because Morti’s algorithm is more intelligent.
When a general robot walks, machine learning will pre-design the details of each leg's movement through a large amount of calculations, which will consume a lot of power. But after Morti falls while walking, he can readjust his walking angle based on the results of the new algorithm. Morti uses this feedback data to learn how to walk without requiring a lot of calculations. Morti can reduce energy consumption during the process of learning to walk. The study found that after Morti walked for an hour, it consumed 42% less energy than when it first started walking.
▲Morti walks on the treadmill
Dhireesha Kudithipudi, a professor at the University of Texas at San Antonio, said : "Generally speaking, artificial intelligence can learn a specific task very well, but artificial intelligence cannot recalibrate when the environment changes. Morti can autonomously adjust its own movement pattern based on data feedback, and it is possible to recalibrate the environment." will perform better."
Conclusion: Combining the fields of artificial intelligence and biology to explore more possibilities of robots
Rupert's robot dog can perform the same tasks as biological creatures through artificial intelligence algorithms Self-learning. This not only combines machine learning technology, but also involves the biological field.
If this technology can be used on a large scale, it will have two benefits: First, machine learning will be more energy-efficient and consume less energy. Machines no longer have to perform brute force calculations based on large amounts of data, but can become "smarter" through autonomous learning. Second, this technology can inspire the integration of the fields of artificial intelligence and biology.
Currently, this technology can make robot dogs more like animals. In the future, as this technology develops, robots may become more like humans.
The above is the detailed content of Can a robot dog learn to walk in one hour? Mimicking animal instincts, research published in Nature sub-journal. For more information, please follow other related articles on the PHP Chinese website!

Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

Video Face Swap
Swap faces in any video effortlessly with our completely free AI face swap tool!

Hot Article
Hot Tools

Notepad++7.3.1
Easy-to-use and free code editor

SublimeText3 Chinese version
Chinese version, very easy to use

Zend Studio 13.0.1
Powerful PHP integrated development environment

Dreamweaver CS6
Visual web development tools

SublimeText3 Mac version
God-level code editing software (SublimeText3)
Hot Topics



 CLIP-BEVFormer: Explicitly supervise the BEVFormer structure to improve long-tail detection performance
Mar 26, 2024 pm 12:41 PM
CLIP-BEVFormer: Explicitly supervise the BEVFormer structure to improve long-tail detection performance
Mar 26, 2024 pm 12:41 PM
Written above & the author’s personal understanding: At present, in the entire autonomous driving system, the perception module plays a vital role. The autonomous vehicle driving on the road can only obtain accurate perception results through the perception module. The downstream regulation and control module in the autonomous driving system makes timely and correct judgments and behavioral decisions. Currently, cars with autonomous driving functions are usually equipped with a variety of data information sensors including surround-view camera sensors, lidar sensors, and millimeter-wave radar sensors to collect information in different modalities to achieve accurate perception tasks. The BEV perception algorithm based on pure vision is favored by the industry because of its low hardware cost and easy deployment, and its output results can be easily applied to various downstream tasks.
 Implementing Machine Learning Algorithms in C++: Common Challenges and Solutions
Jun 03, 2024 pm 01:25 PM
Implementing Machine Learning Algorithms in C++: Common Challenges and Solutions
Jun 03, 2024 pm 01:25 PM
Common challenges faced by machine learning algorithms in C++ include memory management, multi-threading, performance optimization, and maintainability. Solutions include using smart pointers, modern threading libraries, SIMD instructions and third-party libraries, as well as following coding style guidelines and using automation tools. Practical cases show how to use the Eigen library to implement linear regression algorithms, effectively manage memory and use high-performance matrix operations.
 Explore the underlying principles and algorithm selection of the C++sort function
Apr 02, 2024 pm 05:36 PM
Explore the underlying principles and algorithm selection of the C++sort function
Apr 02, 2024 pm 05:36 PM
The bottom layer of the C++sort function uses merge sort, its complexity is O(nlogn), and provides different sorting algorithm choices, including quick sort, heap sort and stable sort.
 Can artificial intelligence predict crime? Explore CrimeGPT's capabilities
Mar 22, 2024 pm 10:10 PM
Can artificial intelligence predict crime? Explore CrimeGPT's capabilities
Mar 22, 2024 pm 10:10 PM
The convergence of artificial intelligence (AI) and law enforcement opens up new possibilities for crime prevention and detection. The predictive capabilities of artificial intelligence are widely used in systems such as CrimeGPT (Crime Prediction Technology) to predict criminal activities. This article explores the potential of artificial intelligence in crime prediction, its current applications, the challenges it faces, and the possible ethical implications of the technology. Artificial Intelligence and Crime Prediction: The Basics CrimeGPT uses machine learning algorithms to analyze large data sets, identifying patterns that can predict where and when crimes are likely to occur. These data sets include historical crime statistics, demographic information, economic indicators, weather patterns, and more. By identifying trends that human analysts might miss, artificial intelligence can empower law enforcement agencies
 Improved detection algorithm: for target detection in high-resolution optical remote sensing images
Jun 06, 2024 pm 12:33 PM
Improved detection algorithm: for target detection in high-resolution optical remote sensing images
Jun 06, 2024 pm 12:33 PM
01 Outlook Summary Currently, it is difficult to achieve an appropriate balance between detection efficiency and detection results. We have developed an enhanced YOLOv5 algorithm for target detection in high-resolution optical remote sensing images, using multi-layer feature pyramids, multi-detection head strategies and hybrid attention modules to improve the effect of the target detection network in optical remote sensing images. According to the SIMD data set, the mAP of the new algorithm is 2.2% better than YOLOv5 and 8.48% better than YOLOX, achieving a better balance between detection results and speed. 02 Background & Motivation With the rapid development of remote sensing technology, high-resolution optical remote sensing images have been used to describe many objects on the earth’s surface, including aircraft, cars, buildings, etc. Object detection in the interpretation of remote sensing images
 Practice and reflections on Jiuzhang Yunji DataCanvas multi-modal large model platform
Oct 20, 2023 am 08:45 AM
Practice and reflections on Jiuzhang Yunji DataCanvas multi-modal large model platform
Oct 20, 2023 am 08:45 AM
1. The historical development of multi-modal large models. The photo above is the first artificial intelligence workshop held at Dartmouth College in the United States in 1956. This conference is also considered to have kicked off the development of artificial intelligence. Participants Mainly the pioneers of symbolic logic (except for the neurobiologist Peter Milner in the middle of the front row). However, this symbolic logic theory could not be realized for a long time, and even ushered in the first AI winter in the 1980s and 1990s. It was not until the recent implementation of large language models that we discovered that neural networks really carry this logical thinking. The work of neurobiologist Peter Milner inspired the subsequent development of artificial neural networks, and it was for this reason that he was invited to participate in this project.
 Application of algorithms in the construction of 58 portrait platform
May 09, 2024 am 09:01 AM
Application of algorithms in the construction of 58 portrait platform
May 09, 2024 am 09:01 AM
1. Background of the Construction of 58 Portraits Platform First of all, I would like to share with you the background of the construction of the 58 Portrait Platform. 1. The traditional thinking of the traditional profiling platform is no longer enough. Building a user profiling platform relies on data warehouse modeling capabilities to integrate data from multiple business lines to build accurate user portraits; it also requires data mining to understand user behavior, interests and needs, and provide algorithms. side capabilities; finally, it also needs to have data platform capabilities to efficiently store, query and share user profile data and provide profile services. The main difference between a self-built business profiling platform and a middle-office profiling platform is that the self-built profiling platform serves a single business line and can be customized on demand; the mid-office platform serves multiple business lines, has complex modeling, and provides more general capabilities. 2.58 User portraits of the background of Zhongtai portrait construction
 Add SOTA in real time and skyrocket! FastOcc: Faster inference and deployment-friendly Occ algorithm is here!
Mar 14, 2024 pm 11:50 PM
Add SOTA in real time and skyrocket! FastOcc: Faster inference and deployment-friendly Occ algorithm is here!
Mar 14, 2024 pm 11:50 PM
Written above & The author’s personal understanding is that in the autonomous driving system, the perception task is a crucial component of the entire autonomous driving system. The main goal of the perception task is to enable autonomous vehicles to understand and perceive surrounding environmental elements, such as vehicles driving on the road, pedestrians on the roadside, obstacles encountered during driving, traffic signs on the road, etc., thereby helping downstream modules Make correct and reasonable decisions and actions. A vehicle with self-driving capabilities is usually equipped with different types of information collection sensors, such as surround-view camera sensors, lidar sensors, millimeter-wave radar sensors, etc., to ensure that the self-driving vehicle can accurately perceive and understand surrounding environment elements. , enabling autonomous vehicles to make correct decisions during autonomous driving. Head
