

A review of end-to-end planning methods for autonomous driving

This article is reprinted with the authorization of the Heart of Autonomous Driving public account. For reprinting, please contact the source of the original text
## 1. Woven Planet (Toyota subsidiary)’s plan: Urban Driver 2021
Although this article is from 21 years old, many new articles use it as a baseline for comparison, so it is necessary to understand its method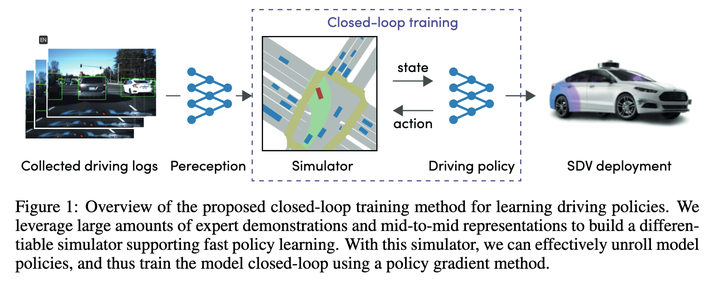
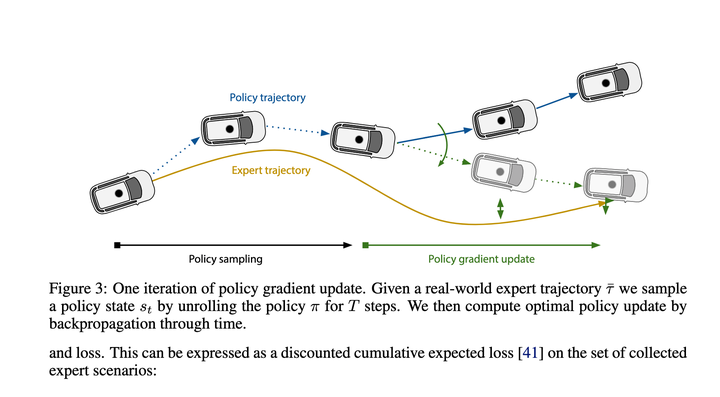 ## After a rough look, the main purpose is to use Policy Gradients to learn the mapping function of State->Recent Action. With this mapping function, the entire execution trajectory can be deduced step by step. In the end, the loss is to let this The trajectory given by the deduction is as close as possible to the expert trajectory.
## After a rough look, the main purpose is to use Policy Gradients to learn the mapping function of State->Recent Action. With this mapping function, the entire execution trajectory can be deduced step by step. In the end, the loss is to let this The trajectory given by the deduction is as close as possible to the expert trajectory.
The effect should be pretty good at the time, so it can become the baseline for new algorithms.
2. Nanyang Technological University Program 1 Conditional Predictive Behavior Planning with Inverse Reinforcement Learning 2023.04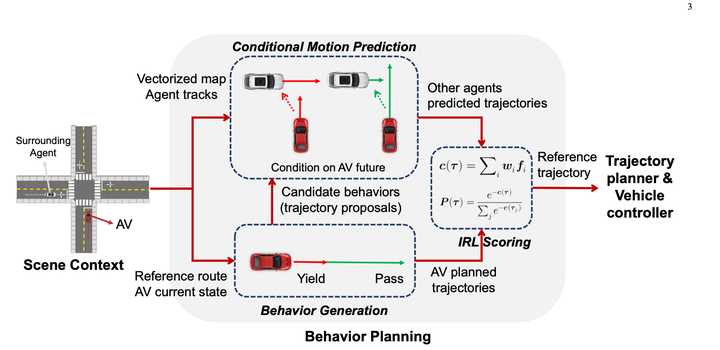 First use rules to enumerate many This behavior generated 10 to 30 trajectories. (Prediction results not used)
First use rules to enumerate many This behavior generated 10 to 30 trajectories. (Prediction results not used)
The Conditional Joint Prediction model looks like this:
 The basically great thing about this method is that it uses Conditional Joint Prediction to achieve good interactivity. The prediction gives the algorithm a certain gaming ability.
The basically great thing about this method is that it uses Conditional Joint Prediction to achieve good interactivity. The prediction gives the algorithm a certain gaming ability.
Use regular tree sampling, consider layer by layer, generate a conditional prediction for each sub-node of each layer, then use rules to score the prediction results and the main vehicle trajectory, and use some rules to classify illegal Kill it, and then use DP to generate the optimal trajectory in the future. The DP idea is somewhat similar to dp_path_optimizer in apollo, but with a time dimension added.
However, because there is one more dimension, after the number of subsequent expansions is too large, the solution space will still be large and the calculation amount will be too large. The method written in the current paper is to randomly discard the nodes after there are too many. Some nodes are added to ensure that the amount of calculation is controllable (it feels like it means that after too many nodes, it may be n levels later, and the impact may be smaller)
The main contribution of this article is to pass a continuous solution space through this tree shape The sampling rule transforms a Markov decision process, which is then solved using dp.
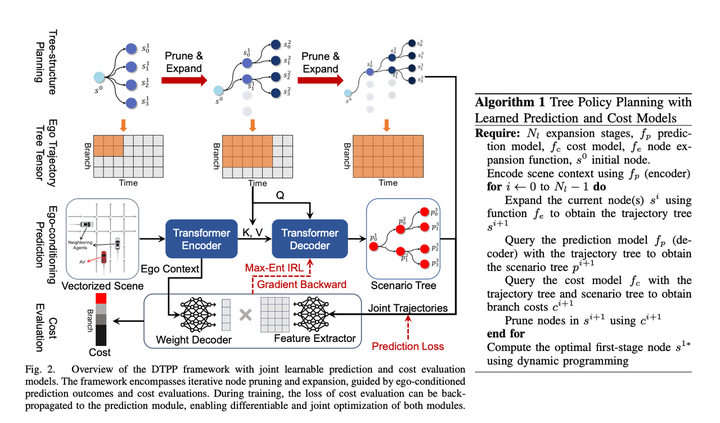
4. The latest joint plan of Nanyang Technological University and NVIDIA in October 2023: DTPP: Differentiable Joint Conditional Prediction and Cost Evaluation for Tree Policy Planning in Autonomous DrivingSee The title feels very Exciting:
1. Conditional Prediction ensures a certain gaming effect
2. It is derivable and can pass back the entire gradient so that prediction and IRL can be trained together. It is also a necessary condition for being able to build an end-to-end autonomous driving3. Tree Policy Planning, which may have certain interactive deduction capabilities
After reading it carefully, I found that this article is very informative and the method Very clever.
 After combining and improving NVIDIA’s TPP and Nanyang Polytechnic’s Conditional Predictive Behavior Planning with Inverse Reinforcement Learning, we successfully solved the problem of poor candidate trajectories in the previous Nanyang Polytechnic paper. Question
After combining and improving NVIDIA’s TPP and Nanyang Polytechnic’s Conditional Predictive Behavior Planning with Inverse Reinforcement Learning, we successfully solved the problem of poor candidate trajectories in the previous Nanyang Polytechnic paper. Question
The main modules of the paper plan include:
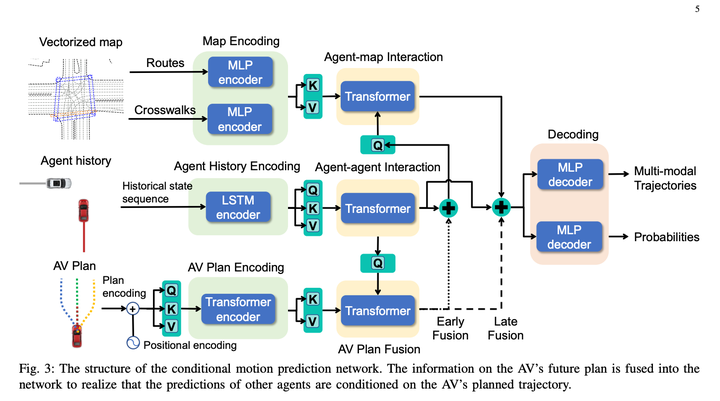
1. Conditional Prediction module, input a main vehicle historical trajectory prompt trajectory and obstacle vehicle historical trajectory, and give the predicted trajectory of the main vehicle approaching the prompt trajectory and The predicted trajectory of the obstacle vehicle is consistent with the behavior of the host vehicle.
2. The scoring module can score a main vehicle obstacle vehicle trajectory to see whether the trajectory resembles the behavior of an expert. The learning method is IRL.3. Tree Policy Search module, used to generate a bunch of candidate trajectories
Use the Tree Search algorithm to explore the feasible solution of the main vehicle. Each step in the exploration process takes the explored trajectory as input, uses the Conditional Prediction algorithm to generate the predicted trajectories of the main vehicle and the obstacle vehicle, and calls the scoring module to evaluate the trajectory. The pros and cons will affect the direction of the next search for expansion nodes. Through this method, you can generate some main vehicle trajectories that are different from other solutions, and consider the interaction with the obstacle vehicle when generating trajectories
Traditional IRL manually creates a lot of features. For example, in order to make the model differentiable, in this article, we directly use the ego context MLP of prediction to generate a Weight array (such as relative s, l and ttc) of a bunch of obstacles in the trajectory time dimension ( size = 1 * C), which implicitly represents the environmental information around the host vehicle, and then uses MLP to directly convert the multi-modal prediction results corresponding to the host vehicle trajectory into a Feature array (size = C * N, N refers to the candidate number of trajectories), and then the two matrices are multiplied to obtain the final trajectory score. Then IRL let the experts score the highest points. Personally, I feel that this may be for calculation efficiency, making the decoder as simple as possible, but there is still a certain loss of main vehicle information. If you do not pay attention to calculation efficiency, you can use some more complex networks to connect Ego Context and Predicted Trajectories, and the effect level should be better. good? Or if you give up differentiability, you can still consider adding manually set features, which should also improve the model effect.
In terms of time, this solution uses a method of re-encoding once and lightweight decoding multiple times, successfully reducing computing delays. The article points out that the delay can be compressed to 98 milliseconds
It belongs to the SOTA ranks among learning based planners, and the closed-loop effect is close to nuplan's No. 1 Rule Based scheme PDM mentioned in the previous article.
Summary
After looking at it, I feel that this paradigm is a pretty good idea. You can adjust the specific process yourself:
- Use the prediction model to guide some rules to generate some candidate ego trajectories
- For each trajectory, use Conditional Joint Prediction to make interactive predictions and generate agent predictions. Can improve gaming performance.
- IRL and other methods use the Conditional Joint Prediction results to score the previous main vehicle trajectory and select the optimal trajectory

need to be rewritten The content is: Original link: https://mp.weixin.qq.com/s/ZJtMU3zGciot1g5BoCe9Ow
The above is the detailed content of A review of end-to-end planning methods for autonomous driving. For more information, please follow other related articles on the PHP Chinese website!

Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

Video Face Swap
Swap faces in any video effortlessly with our completely free AI face swap tool!

Hot Article
Hot Tools

Notepad++7.3.1
Easy-to-use and free code editor

SublimeText3 Chinese version
Chinese version, very easy to use

Zend Studio 13.0.1
Powerful PHP integrated development environment

Dreamweaver CS6
Visual web development tools

SublimeText3 Mac version
God-level code editing software (SublimeText3)
Hot Topics



 Why is Gaussian Splatting so popular in autonomous driving that NeRF is starting to be abandoned?
Jan 17, 2024 pm 02:57 PM
Why is Gaussian Splatting so popular in autonomous driving that NeRF is starting to be abandoned?
Jan 17, 2024 pm 02:57 PM
Written above & the author’s personal understanding Three-dimensional Gaussiansplatting (3DGS) is a transformative technology that has emerged in the fields of explicit radiation fields and computer graphics in recent years. This innovative method is characterized by the use of millions of 3D Gaussians, which is very different from the neural radiation field (NeRF) method, which mainly uses an implicit coordinate-based model to map spatial coordinates to pixel values. With its explicit scene representation and differentiable rendering algorithms, 3DGS not only guarantees real-time rendering capabilities, but also introduces an unprecedented level of control and scene editing. This positions 3DGS as a potential game-changer for next-generation 3D reconstruction and representation. To this end, we provide a systematic overview of the latest developments and concerns in the field of 3DGS for the first time.
 How to solve the long tail problem in autonomous driving scenarios?
Jun 02, 2024 pm 02:44 PM
How to solve the long tail problem in autonomous driving scenarios?
Jun 02, 2024 pm 02:44 PM
Yesterday during the interview, I was asked whether I had done any long-tail related questions, so I thought I would give a brief summary. The long-tail problem of autonomous driving refers to edge cases in autonomous vehicles, that is, possible scenarios with a low probability of occurrence. The perceived long-tail problem is one of the main reasons currently limiting the operational design domain of single-vehicle intelligent autonomous vehicles. The underlying architecture and most technical issues of autonomous driving have been solved, and the remaining 5% of long-tail problems have gradually become the key to restricting the development of autonomous driving. These problems include a variety of fragmented scenarios, extreme situations, and unpredictable human behavior. The "long tail" of edge scenarios in autonomous driving refers to edge cases in autonomous vehicles (AVs). Edge cases are possible scenarios with a low probability of occurrence. these rare events
 Choose camera or lidar? A recent review on achieving robust 3D object detection
Jan 26, 2024 am 11:18 AM
Choose camera or lidar? A recent review on achieving robust 3D object detection
Jan 26, 2024 am 11:18 AM
0.Written in front&& Personal understanding that autonomous driving systems rely on advanced perception, decision-making and control technologies, by using various sensors (such as cameras, lidar, radar, etc.) to perceive the surrounding environment, and using algorithms and models for real-time analysis and decision-making. This enables vehicles to recognize road signs, detect and track other vehicles, predict pedestrian behavior, etc., thereby safely operating and adapting to complex traffic environments. This technology is currently attracting widespread attention and is considered an important development area in the future of transportation. one. But what makes autonomous driving difficult is figuring out how to make the car understand what's going on around it. This requires that the three-dimensional object detection algorithm in the autonomous driving system can accurately perceive and describe objects in the surrounding environment, including their locations,
 The Stable Diffusion 3 paper is finally released, and the architectural details are revealed. Will it help to reproduce Sora?
Mar 06, 2024 pm 05:34 PM
The Stable Diffusion 3 paper is finally released, and the architectural details are revealed. Will it help to reproduce Sora?
Mar 06, 2024 pm 05:34 PM
StableDiffusion3’s paper is finally here! This model was released two weeks ago and uses the same DiT (DiffusionTransformer) architecture as Sora. It caused quite a stir once it was released. Compared with the previous version, the quality of the images generated by StableDiffusion3 has been significantly improved. It now supports multi-theme prompts, and the text writing effect has also been improved, and garbled characters no longer appear. StabilityAI pointed out that StableDiffusion3 is a series of models with parameter sizes ranging from 800M to 8B. This parameter range means that the model can be run directly on many portable devices, significantly reducing the use of AI
 This article is enough for you to read about autonomous driving and trajectory prediction!
Feb 28, 2024 pm 07:20 PM
This article is enough for you to read about autonomous driving and trajectory prediction!
Feb 28, 2024 pm 07:20 PM
Trajectory prediction plays an important role in autonomous driving. Autonomous driving trajectory prediction refers to predicting the future driving trajectory of the vehicle by analyzing various data during the vehicle's driving process. As the core module of autonomous driving, the quality of trajectory prediction is crucial to downstream planning control. The trajectory prediction task has a rich technology stack and requires familiarity with autonomous driving dynamic/static perception, high-precision maps, lane lines, neural network architecture (CNN&GNN&Transformer) skills, etc. It is very difficult to get started! Many fans hope to get started with trajectory prediction as soon as possible and avoid pitfalls. Today I will take stock of some common problems and introductory learning methods for trajectory prediction! Introductory related knowledge 1. Are the preview papers in order? A: Look at the survey first, p
 Let's talk about end-to-end and next-generation autonomous driving systems, as well as some misunderstandings about end-to-end autonomous driving?
Apr 15, 2024 pm 04:13 PM
Let's talk about end-to-end and next-generation autonomous driving systems, as well as some misunderstandings about end-to-end autonomous driving?
Apr 15, 2024 pm 04:13 PM
In the past month, due to some well-known reasons, I have had very intensive exchanges with various teachers and classmates in the industry. An inevitable topic in the exchange is naturally end-to-end and the popular Tesla FSDV12. I would like to take this opportunity to sort out some of my thoughts and opinions at this moment for your reference and discussion. How to define an end-to-end autonomous driving system, and what problems should be expected to be solved end-to-end? According to the most traditional definition, an end-to-end system refers to a system that inputs raw information from sensors and directly outputs variables of concern to the task. For example, in image recognition, CNN can be called end-to-end compared to the traditional feature extractor + classifier method. In autonomous driving tasks, input data from various sensors (camera/LiDAR
 SIMPL: A simple and efficient multi-agent motion prediction benchmark for autonomous driving
Feb 20, 2024 am 11:48 AM
SIMPL: A simple and efficient multi-agent motion prediction benchmark for autonomous driving
Feb 20, 2024 am 11:48 AM
Original title: SIMPL: ASimpleandEfficientMulti-agentMotionPredictionBaselineforAutonomousDriving Paper link: https://arxiv.org/pdf/2402.02519.pdf Code link: https://github.com/HKUST-Aerial-Robotics/SIMPL Author unit: Hong Kong University of Science and Technology DJI Paper idea: This paper proposes a simple and efficient motion prediction baseline (SIMPL) for autonomous vehicles. Compared with traditional agent-cent
 FisheyeDetNet: the first target detection algorithm based on fisheye camera
Apr 26, 2024 am 11:37 AM
FisheyeDetNet: the first target detection algorithm based on fisheye camera
Apr 26, 2024 am 11:37 AM
Target detection is a relatively mature problem in autonomous driving systems, among which pedestrian detection is one of the earliest algorithms to be deployed. Very comprehensive research has been carried out in most papers. However, distance perception using fisheye cameras for surround view is relatively less studied. Due to large radial distortion, standard bounding box representation is difficult to implement in fisheye cameras. To alleviate the above description, we explore extended bounding box, ellipse, and general polygon designs into polar/angular representations and define an instance segmentation mIOU metric to analyze these representations. The proposed model fisheyeDetNet with polygonal shape outperforms other models and simultaneously achieves 49.5% mAP on the Valeo fisheye camera dataset for autonomous driving
