

Disturbingly, robot dogs already have this ability

The use of a single neural network to achieve manipulation is a major technological breakthrough in the field of quadruped robots
Parkour is an extreme sport that requires participation The robot can overcome obstacles in a highly dynamic manner. For robots that are "clumsy" most of the time, this seems to be something out of reach. However, there have been some recent trends in technological breakthroughs in the field of robot control. A few weeks ago, this site reported on a study that used reinforcement learning methods to achieve parkour on a robot dog, and achieved good results. Recently, a new study conducted by Carnegie Mellon University (CMU) proposed a stunning new method for the challenge of robot dog parkour, and the effect was further improved to the point that people agreed Rated as "amazing"
The audience said: "It's like being in "Black Mirror.""Research at Carnegie Mellon University enables a robot dog to automatically cross discontinuous boxes like a competitor in an obstacle course, and easily run and jump between slopes inclined at different angles
 And the speed of passing these obstacles is also very fast.
And the speed of passing these obstacles is also very fast. Easily jump over a gap of 0.8 meters (2 times the length of the robot dog):
 Climb over a height of 0.51 meters (2 times the height of the robot dog) ) Obstacles:
Climb over a height of 0.51 meters (2 times the height of the robot dog) ) Obstacles:  # This time, I couldn’t stand firmly, and it used its hind legs to compensate, acting like a real dog.
# This time, I couldn’t stand firmly, and it used its hind legs to compensate, acting like a real dog. Robot dogs can also do things that are difficult for animals in the real world, such as walking with only two front legs, which is equivalent to walking upside down
 Can also go down stairs with only two front legs:
Can also go down stairs with only two front legs:  It’s like encountering a bug in the game, a bit funny, and at the same time with a hint of uncanny valley effect
It’s like encountering a bug in the game, a bit funny, and at the same time with a hint of uncanny valley effectThe goal of this research is to enable small, low-cost robot dogs to successfully complete parkour tasks. The driving system of this robot dog is not precise enough and only has a front-facing depth camera for perception, which is low-frequency and prone to jitter and artifacts. The study proposes a method based on raw depth and onboard A neural network of sensor inputs is used to directly generate joint angle commands. By conducting large-scale reinforcement learning simulation training, this method is able to solve the challenges caused by sensor inaccuracies and actuator issues, thereby achieving end-to-end high-precision control behavior. This research project has been released on the open source platform
 Please click the following link to view the paper: https://extreme-parkour.github.io/resources /parkour.pdf
Please click the following link to view the paper: https://extreme-parkour.github.io/resources /parkour.pdfProject address: https://github.com/chengxuxin/extreme-parkour
- Method introduction
This research uses an end-to-end data-driven reinforcement learning framework to equip the robot dog with the ability to "parkour". In order to allow the robot dog to self-adjust according to the obstacle type when deployed, this research proposes a novel dual distillation method. This strategy can not only output flexible motion commands, but also quickly adjust the direction according to the input depth image.
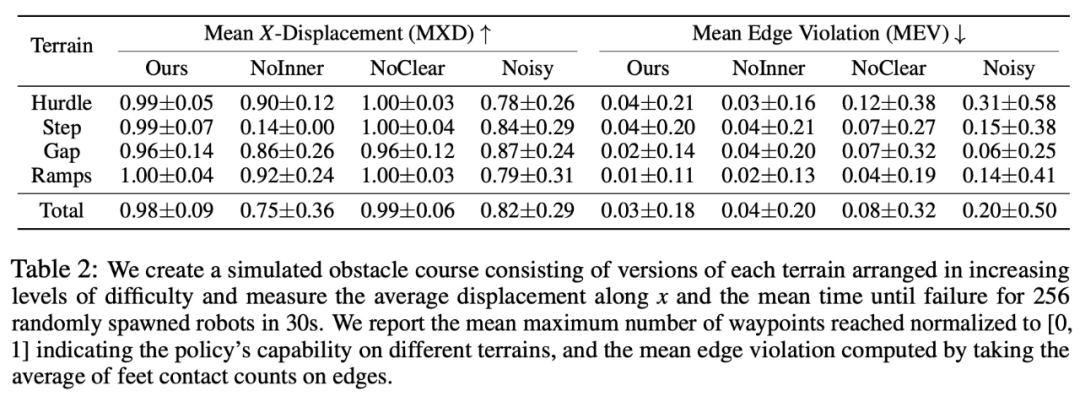
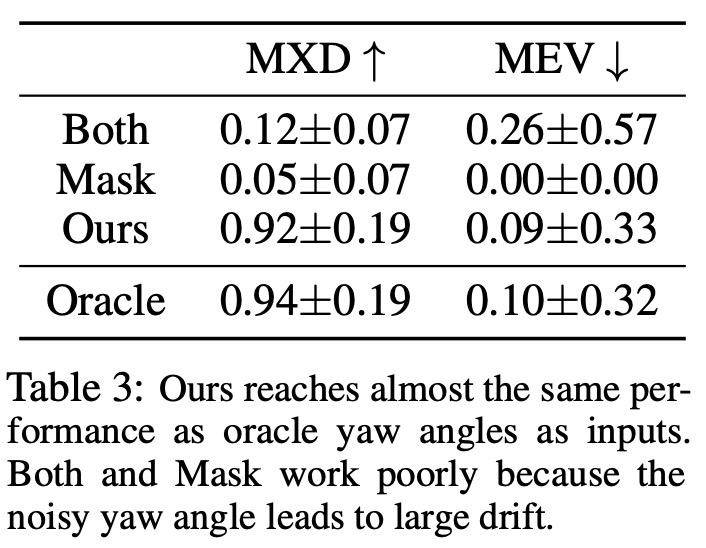
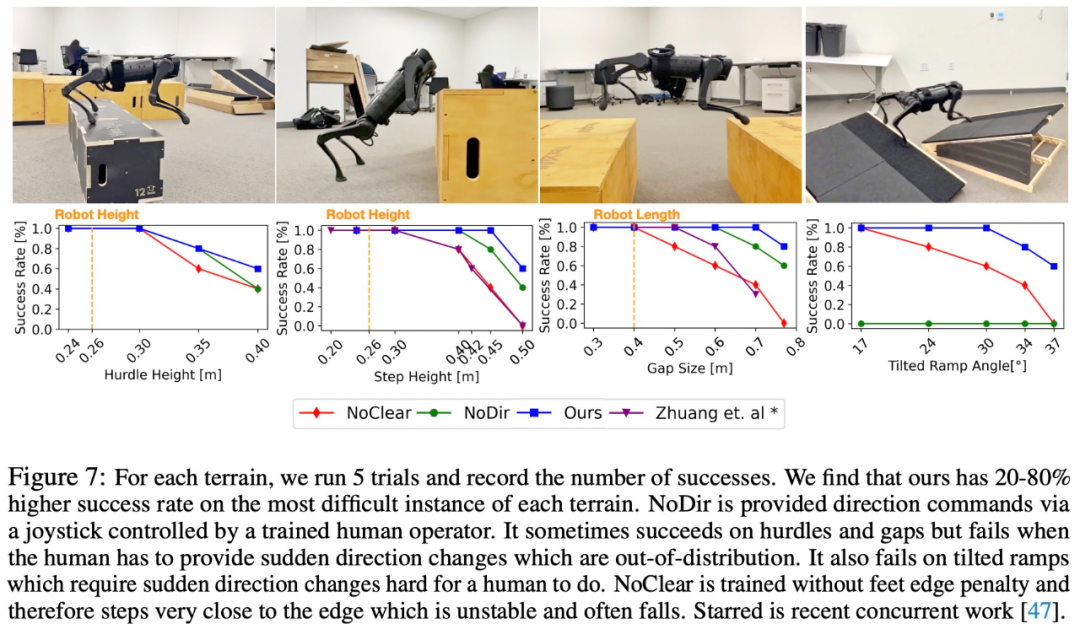
#In order to enable a single neural network to represent different parkour skill behaviors, this study proposes a simple and effective universal reward design principle based on inner products.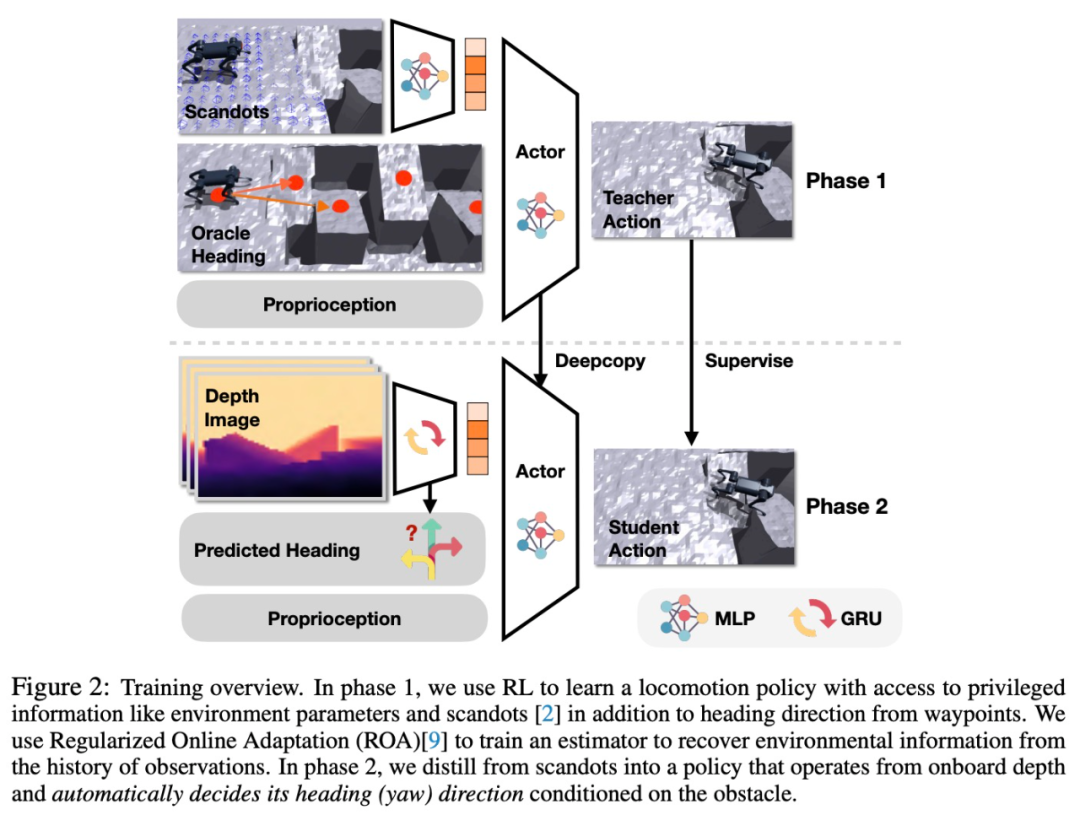 Specifically, the research aims to train a neural network directly from raw depth and onboard sensing to joint angle commands. To train adaptive movement strategies, this study adopted the regularized online adaptation (ROA) method with key modifications for extreme parkour tasks.
Specifically, the research aims to train a neural network directly from raw depth and onboard sensing to joint angle commands. To train adaptive movement strategies, this study adopted the regularized online adaptation (ROA) method with key modifications for extreme parkour tasks. The goal of this research is to let the robot dog master 4 skills, including climbing, jumping over gaps, running and jumping on slopes, and standing upside down. Table 1 below shows the comparison results compared with several other methods In order to verify the role of each part in the system, the study proposed two sets of baselines. The study first tested the reward design and overall process, and the results are shown in Table 2 below: The purpose of the second set of baselines is to test the distillation settings, which include the ones used for direction prediction BC and dagger for action. The experimental results are shown in Table 3 #In addition, the study also conducted a number of real-life experiments, recorded the success rate, and compared it with the NoClear and NoDir baselines. The experimental results are shown in Figure 7 #Interested readers can read the original text of the paper to learn more about the research content. 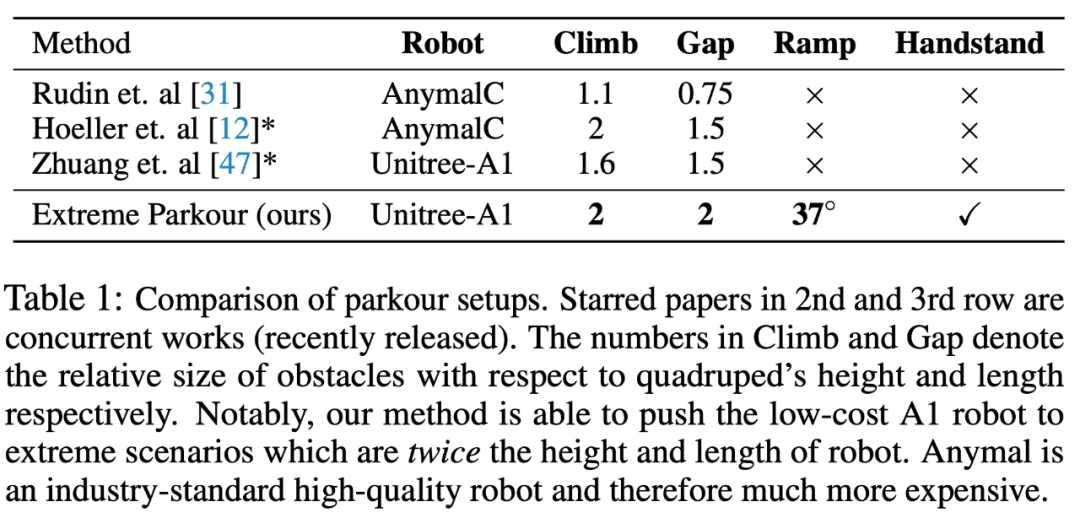
The above is the detailed content of Disturbingly, robot dogs already have this ability. For more information, please follow other related articles on the PHP Chinese website!

Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

Video Face Swap
Swap faces in any video effortlessly with our completely free AI face swap tool!

Hot Article
Hot Tools

Notepad++7.3.1
Easy-to-use and free code editor

SublimeText3 Chinese version
Chinese version, very easy to use

Zend Studio 13.0.1
Powerful PHP integrated development environment

Dreamweaver CS6
Visual web development tools

SublimeText3 Mac version
God-level code editing software (SublimeText3)
Hot Topics



 The author of ControlNet has another hit! The whole process of generating a painting from a picture, earning 1.4k stars in two days
Jul 17, 2024 am 01:56 AM
The author of ControlNet has another hit! The whole process of generating a painting from a picture, earning 1.4k stars in two days
Jul 17, 2024 am 01:56 AM
It is also a Tusheng video, but PaintsUndo has taken a different route. ControlNet author LvminZhang started to live again! This time I aim at the field of painting. The new project PaintsUndo has received 1.4kstar (still rising crazily) not long after it was launched. Project address: https://github.com/lllyasviel/Paints-UNDO Through this project, the user inputs a static image, and PaintsUndo can automatically help you generate a video of the entire painting process, from line draft to finished product. follow. During the drawing process, the line changes are amazing. The final video result is very similar to the original image: Let’s take a look at a complete drawing.
 Topping the list of open source AI software engineers, UIUC's agent-less solution easily solves SWE-bench real programming problems
Jul 17, 2024 pm 10:02 PM
Topping the list of open source AI software engineers, UIUC's agent-less solution easily solves SWE-bench real programming problems
Jul 17, 2024 pm 10:02 PM
The AIxiv column is a column where this site publishes academic and technical content. In the past few years, the AIxiv column of this site has received more than 2,000 reports, covering top laboratories from major universities and companies around the world, effectively promoting academic exchanges and dissemination. If you have excellent work that you want to share, please feel free to contribute or contact us for reporting. Submission email: liyazhou@jiqizhixin.com; zhaoyunfeng@jiqizhixin.com The authors of this paper are all from the team of teacher Zhang Lingming at the University of Illinois at Urbana-Champaign (UIUC), including: Steven Code repair; Deng Yinlin, fourth-year doctoral student, researcher
 From RLHF to DPO to TDPO, large model alignment algorithms are already 'token-level'
Jun 24, 2024 pm 03:04 PM
From RLHF to DPO to TDPO, large model alignment algorithms are already 'token-level'
Jun 24, 2024 pm 03:04 PM
The AIxiv column is a column where this site publishes academic and technical content. In the past few years, the AIxiv column of this site has received more than 2,000 reports, covering top laboratories from major universities and companies around the world, effectively promoting academic exchanges and dissemination. If you have excellent work that you want to share, please feel free to contribute or contact us for reporting. Submission email: liyazhou@jiqizhixin.com; zhaoyunfeng@jiqizhixin.com In the development process of artificial intelligence, the control and guidance of large language models (LLM) has always been one of the core challenges, aiming to ensure that these models are both powerful and safe serve human society. Early efforts focused on reinforcement learning methods through human feedback (RL
 Posthumous work of the OpenAI Super Alignment Team: Two large models play a game, and the output becomes more understandable
Jul 19, 2024 am 01:29 AM
Posthumous work of the OpenAI Super Alignment Team: Two large models play a game, and the output becomes more understandable
Jul 19, 2024 am 01:29 AM
If the answer given by the AI model is incomprehensible at all, would you dare to use it? As machine learning systems are used in more important areas, it becomes increasingly important to demonstrate why we can trust their output, and when not to trust them. One possible way to gain trust in the output of a complex system is to require the system to produce an interpretation of its output that is readable to a human or another trusted system, that is, fully understandable to the point that any possible errors can be found. For example, to build trust in the judicial system, we require courts to provide clear and readable written opinions that explain and support their decisions. For large language models, we can also adopt a similar approach. However, when taking this approach, ensure that the language model generates
 A significant breakthrough in the Riemann Hypothesis! Tao Zhexuan strongly recommends new papers from MIT and Oxford, and the 37-year-old Fields Medal winner participated
Aug 05, 2024 pm 03:32 PM
A significant breakthrough in the Riemann Hypothesis! Tao Zhexuan strongly recommends new papers from MIT and Oxford, and the 37-year-old Fields Medal winner participated
Aug 05, 2024 pm 03:32 PM
Recently, the Riemann Hypothesis, known as one of the seven major problems of the millennium, has achieved a new breakthrough. The Riemann Hypothesis is a very important unsolved problem in mathematics, related to the precise properties of the distribution of prime numbers (primes are those numbers that are only divisible by 1 and themselves, and they play a fundamental role in number theory). In today's mathematical literature, there are more than a thousand mathematical propositions based on the establishment of the Riemann Hypothesis (or its generalized form). In other words, once the Riemann Hypothesis and its generalized form are proven, these more than a thousand propositions will be established as theorems, which will have a profound impact on the field of mathematics; and if the Riemann Hypothesis is proven wrong, then among these propositions part of it will also lose its effectiveness. New breakthrough comes from MIT mathematics professor Larry Guth and Oxford University
 The first Mamba-based MLLM is here! Model weights, training code, etc. have all been open source
Jul 17, 2024 am 02:46 AM
The first Mamba-based MLLM is here! Model weights, training code, etc. have all been open source
Jul 17, 2024 am 02:46 AM
The AIxiv column is a column where this site publishes academic and technical content. In the past few years, the AIxiv column of this site has received more than 2,000 reports, covering top laboratories from major universities and companies around the world, effectively promoting academic exchanges and dissemination. If you have excellent work that you want to share, please feel free to contribute or contact us for reporting. Submission email: liyazhou@jiqizhixin.com; zhaoyunfeng@jiqizhixin.com. Introduction In recent years, the application of multimodal large language models (MLLM) in various fields has achieved remarkable success. However, as the basic model for many downstream tasks, current MLLM consists of the well-known Transformer network, which
 arXiv papers can be posted as 'barrage', Stanford alphaXiv discussion platform is online, LeCun likes it
Aug 01, 2024 pm 05:18 PM
arXiv papers can be posted as 'barrage', Stanford alphaXiv discussion platform is online, LeCun likes it
Aug 01, 2024 pm 05:18 PM
cheers! What is it like when a paper discussion is down to words? Recently, students at Stanford University created alphaXiv, an open discussion forum for arXiv papers that allows questions and comments to be posted directly on any arXiv paper. Website link: https://alphaxiv.org/ In fact, there is no need to visit this website specifically. Just change arXiv in any URL to alphaXiv to directly open the corresponding paper on the alphaXiv forum: you can accurately locate the paragraphs in the paper, Sentence: In the discussion area on the right, users can post questions to ask the author about the ideas and details of the paper. For example, they can also comment on the content of the paper, such as: "Given to
 Axiomatic training allows LLM to learn causal reasoning: the 67 million parameter model is comparable to the trillion parameter level GPT-4
Jul 17, 2024 am 10:14 AM
Axiomatic training allows LLM to learn causal reasoning: the 67 million parameter model is comparable to the trillion parameter level GPT-4
Jul 17, 2024 am 10:14 AM
Show the causal chain to LLM and it learns the axioms. AI is already helping mathematicians and scientists conduct research. For example, the famous mathematician Terence Tao has repeatedly shared his research and exploration experience with the help of AI tools such as GPT. For AI to compete in these fields, strong and reliable causal reasoning capabilities are essential. The research to be introduced in this article found that a Transformer model trained on the demonstration of the causal transitivity axiom on small graphs can generalize to the transitive axiom on large graphs. In other words, if the Transformer learns to perform simple causal reasoning, it may be used for more complex causal reasoning. The axiomatic training framework proposed by the team is a new paradigm for learning causal reasoning based on passive data, with only demonstrations
