
 Technology peripherals
AI
Top issue published! Professor Li Yibin's team from Shandong University developed a simple and highly maneuverable wheel-legged composite robot
Technology peripherals
AI
Top issue published! Professor Li Yibin's team from Shandong University developed a simple and highly maneuverable wheel-legged composite robot
Top issue published! Professor Li Yibin's team from Shandong University developed a simple and highly maneuverable wheel-legged composite robot

Human beings have dreamed of developing mobile mechanisms that can adapt to a variety of wild terrains since ancient times. Wheeled mobile platform has good motion stability and movement efficiency, but is difficult to travel in rugged terrain; legged robot has good terrain adaptability and movement flexibility , but its motion stability and energy efficiency need to be improved.
In order to combine the advantages of wheel movement and leg and foot movement, the wheel-leg compound movement mechanism was born. Common wheel and leg composite mechanisms mainly include special-shaped wheels (such as RHex), spoked wheels (such as Whegs), deformed wheels (such as OmniWheg), wheel legs in series (such as Wheeled-ANYmal), etc., as shown in Figure X.
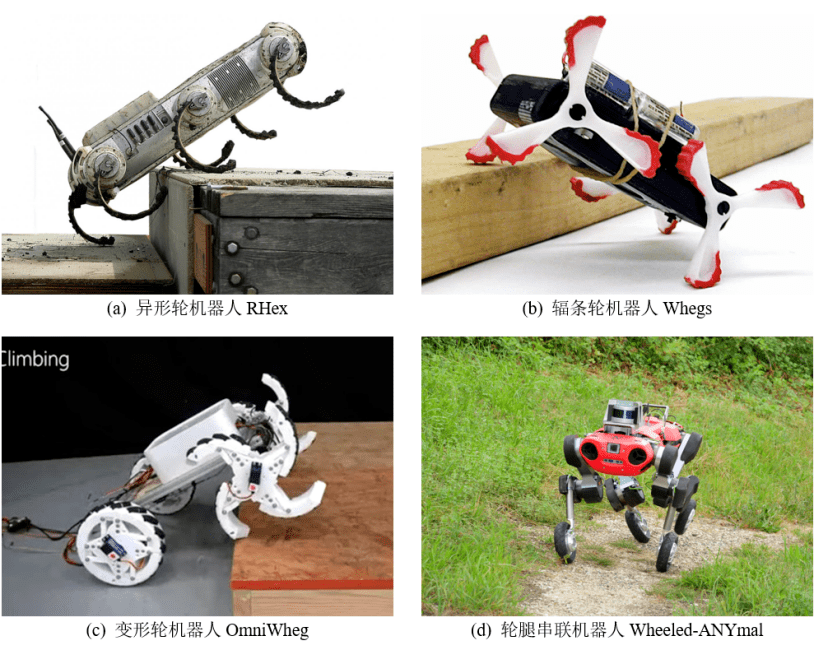
Figure 1 Common wheel-legged composite robot
Recently, the team of Professor Li Yibin of Shandong University, Professor Ma Shugen of Ritsumeikan University, Japan, Professor Liu Jinguo of Shenyang Institute of Automation, Chinese Academy of Sciences, and Associate Researcher Kong Lingyu of Zhijiang Laboratory, developed a new type of wheel-legged composite robot, named For Q-Whex, is shown in Figure 2.
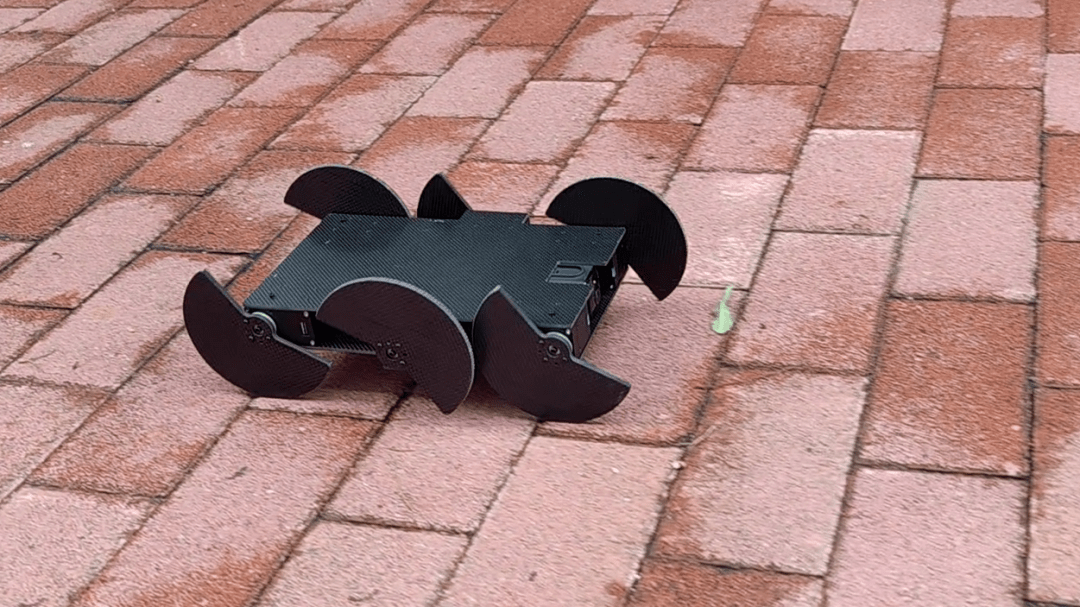
Figure 2 Q-Whex robot
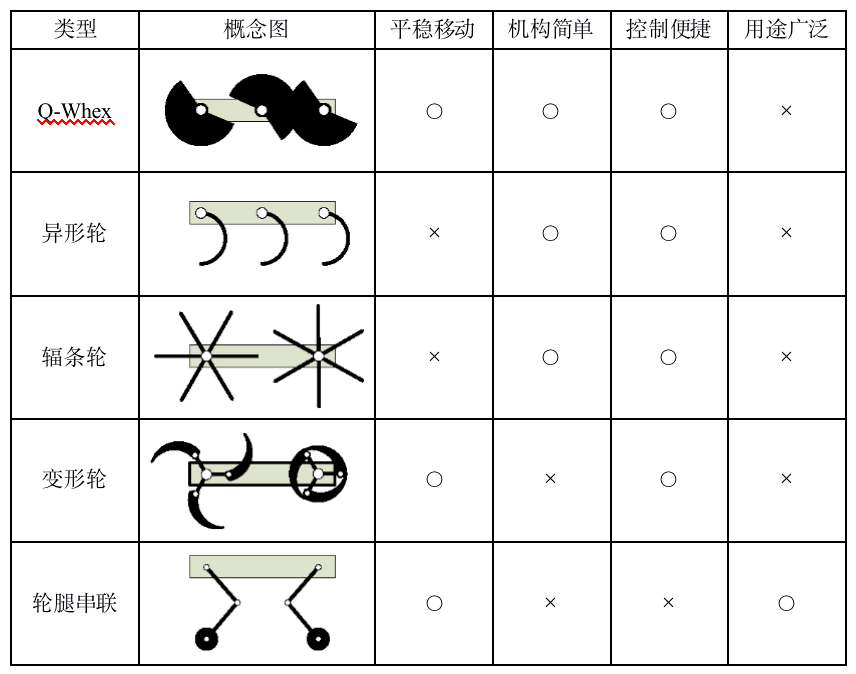
Q-Whex can move smoothly on flat ground like a wheeled mobile platform, and can climb over obstacles higher than its chassis height like a footed robot. Compared with other wheel-legged composite mobile robots, Q-Whex has advantages in terms of motion smoothness, mechanism complexity and control difficulty, as shown in Table 1.
Table 1 Comparison between Q-Whex and other types of wheel-legged composite mobile robots
This work was published in the Journal of Field Robotics under the title "Q-Whex: A simple and highly mobile quasi-wheeled hexapod robot".
▍Simple mechanism and convenient control
The Q-Whex robot shown in the paper is 277.5 mm long, 204.8 mm wide, 39.5 mm high, has a dead weight of 2.4kg, and can reach a forward speed of 0.44 m/s with a load of 2.65 kg. Q-Whex consists of a main body and six isomorphic sector-shaped half-wheel drive systems. The control circuit, IMU, battery, and camera are integrated inside the torso. The drive motor of the wheel leg structure is also placed inside the torso. Each half wheel has a 210° fan-shaped structure, and the output shaft of the motor is connected to the fan center to achieve rotation. When the fan-shaped When the arc edge touches the ground, it is wheeled movement. When the fan-shaped edge touches the ground, the effect of leg-type obstacle surmounting can be achieved.
The production and assembly of Q-Whex is very simple, as shown in Figure 3. The components inside the motor and torso are installed between two carbon fiber plates, and each sector-shaped half wheel is also made of carbon fiber plates.

Figure 3 Q-Whex decomposition diagram
Q-Whex's motion control is also very easy. Each sector-shaped half-wheel rotates continuously. Steering can be achieved by controlling the speed difference between the left sector-shaped half-wheel and the right sector-shaped half-wheel of the robot. By controlling the rotation angle of each sector-shaped half-wheel, The phase difference between them can generate different gaits. Figure 4 shows the four typical gaits of Q-Whex.
Figure 4 Q-Whex typical gait display
▍Wheel and leg combination, climbing and overcoming obstacles
Q-Whex adopts triangular gait and can move smoothly on flat ground like a wheeled mobile platform, as shown in Figure 5.

Figure 5 Q-Whex moves smoothly on flat ground
Q-Whex can also easily handle snow, ice, gravel and other surfaces, as shown in Figure 6.

Figure 6 Q-Whex operates on a variety of surfaces
Using symmetrical gait, you can go up and down 32-degree slopes, as shown in Figure 7.

Figure 7 Q-Whex on a 32-degree slope
Can climb continuous steps, as shown in Figure 8.
Figure 8 Q-Whex climbs continuous steps
Various rugged terrains are not a problem, as shown in Figure 9.
Figure 9 Q-Whex running in rugged terrain
▍Symmetrical configuration, no fear of overturning
Since the structural design of the Q-Whex robot adopts a symmetrical configuration in the three directions of front and back, left and right, and up and down, there is no difference between front and back and front and back during its movement. When the robot accidentally overturns while driving, it can continue moving forward in the "backside up" configuration, thus having excellent insurance and fault tolerance for risks and accidents in complex environment movements. Figure 10 shows that the robot overturned during the climbing process and then completed the climb in a "back-up" posture.
Figure 10 Q-Whex can continue driving after overturning
▍Airborne camera, remote detection
Small camera equipment has been installed on the Q-Whex robot and can transmit the collected images to the remote operator in real time via WiFi or 4G network. Therefore, Q-Whex can perform unmanned detection tasks, as shown in Figure 11.
Figure 11 Q-Whex can use airborne cameras for remote detection
You can also tease the cat remotely, as shown in Figure 12.
Picture 12 Q-Whex and cat
Q-Whex is essentially a new wheel-leg composite mobility concept. Its high maneuverability and strong passability are derived from the continuous rotation and mutual phase coordination of six independently driven sector-shaped half-wheels. This concept can be applied to mobile platforms required for industrial inspections, logistics transportation, field detection, etc. The appropriate configuration and size should be selected according to actual application requirements. The robot does not need to adopt complex perception or control strategies, and its simplicity in structure and control improves the robustness and reliability of the system.
The first author of the paper is Associate Researcher Zhang Guoteng of Shandong University, email:
guoteng@email.sdu.edu.cn.
Paper link:
https://doi.org/10.1002/rob.22186
The above is the detailed content of Top issue published! Professor Li Yibin's team from Shandong University developed a simple and highly maneuverable wheel-legged composite robot. For more information, please follow other related articles on the PHP Chinese website!

Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

Video Face Swap
Swap faces in any video effortlessly with our completely free AI face swap tool!

Hot Article
Hot Tools

Notepad++7.3.1
Easy-to-use and free code editor

SublimeText3 Chinese version
Chinese version, very easy to use

Zend Studio 13.0.1
Powerful PHP integrated development environment

Dreamweaver CS6
Visual web development tools

SublimeText3 Mac version
God-level code editing software (SublimeText3)
Hot Topics



 The second generation Ameca is here! He can communicate with the audience fluently, his facial expressions are more realistic, and he can speak dozens of languages.
Mar 04, 2024 am 09:10 AM
The second generation Ameca is here! He can communicate with the audience fluently, his facial expressions are more realistic, and he can speak dozens of languages.
Mar 04, 2024 am 09:10 AM
The humanoid robot Ameca has been upgraded to the second generation! Recently, at the World Mobile Communications Conference MWC2024, the world's most advanced robot Ameca appeared again. Around the venue, Ameca attracted a large number of spectators. With the blessing of GPT-4, Ameca can respond to various problems in real time. "Let's have a dance." When asked if she had emotions, Ameca responded with a series of facial expressions that looked very lifelike. Just a few days ago, EngineeredArts, the British robotics company behind Ameca, just demonstrated the team’s latest development results. In the video, the robot Ameca has visual capabilities and can see and describe the entire room and specific objects. The most amazing thing is that she can also
 After 2 months, the humanoid robot Walker S can fold clothes
Apr 03, 2024 am 08:01 AM
After 2 months, the humanoid robot Walker S can fold clothes
Apr 03, 2024 am 08:01 AM
Editor of Machine Power Report: Wu Xin The domestic version of the humanoid robot + large model team completed the operation task of complex flexible materials such as folding clothes for the first time. With the unveiling of Figure01, which integrates OpenAI's multi-modal large model, the related progress of domestic peers has been attracting attention. Just yesterday, UBTECH, China's "number one humanoid robot stock", released the first demo of the humanoid robot WalkerS that is deeply integrated with Baidu Wenxin's large model, showing some interesting new features. Now, WalkerS, blessed by Baidu Wenxin’s large model capabilities, looks like this. Like Figure01, WalkerS does not move around, but stands behind a desk to complete a series of tasks. It can follow human commands and fold clothes
 How can AI make robots more autonomous and adaptable?
Jun 03, 2024 pm 07:18 PM
How can AI make robots more autonomous and adaptable?
Jun 03, 2024 pm 07:18 PM
In the field of industrial automation technology, there are two recent hot spots that are difficult to ignore: artificial intelligence (AI) and Nvidia. Don’t change the meaning of the original content, fine-tune the content, rewrite the content, don’t continue: “Not only that, the two are closely related, because Nvidia is expanding beyond just its original graphics processing units (GPUs). The technology extends to the field of digital twins and is closely connected to emerging AI technologies. "Recently, NVIDIA has reached cooperation with many industrial companies, including leading industrial automation companies such as Aveva, Rockwell Automation, Siemens and Schneider Electric, as well as Teradyne Robotics and its MiR and Universal Robots companies. Recently,Nvidiahascoll
 The first robot to autonomously complete human tasks appears, with five fingers that are flexible and fast, and large models support virtual space training
Mar 11, 2024 pm 12:10 PM
The first robot to autonomously complete human tasks appears, with five fingers that are flexible and fast, and large models support virtual space training
Mar 11, 2024 pm 12:10 PM
This week, FigureAI, a robotics company invested by OpenAI, Microsoft, Bezos, and Nvidia, announced that it has received nearly $700 million in financing and plans to develop a humanoid robot that can walk independently within the next year. And Tesla’s Optimus Prime has repeatedly received good news. No one doubts that this year will be the year when humanoid robots explode. SanctuaryAI, a Canadian-based robotics company, recently released a new humanoid robot, Phoenix. Officials claim that it can complete many tasks autonomously at the same speed as humans. Pheonix, the world's first robot that can autonomously complete tasks at human speeds, can gently grab, move and elegantly place each object to its left and right sides. It can autonomously identify objects
 The humanoid robot can do magic, let the Spring Festival Gala program team find out more
Feb 04, 2024 am 09:03 AM
The humanoid robot can do magic, let the Spring Festival Gala program team find out more
Feb 04, 2024 am 09:03 AM
In the blink of an eye, robots have learned to do magic? It was seen that it first picked up the water spoon on the table and proved to the audience that there was nothing in it... Then it put the egg-like object in its hand, then put the water spoon back on the table and started to "cast a spell"... …Just when it picked up the water spoon again, a miracle happened. The egg that was originally put in disappeared, and the thing that jumped out turned into a basketball... Let’s look at the continuous actions again: △ This animation shows a set of actions at 2x speed, and it flows smoothly. Only by watching the video repeatedly at 0.5x speed can it be understood. Finally, I discovered the clues: if my hand speed were faster, I might be able to hide it from the enemy. Some netizens lamented that the robot’s magic skills were even higher than their own: Mag was the one who performed this magic for us.
 Cloud Whale Xiaoyao 001 sweeping and mopping robot has a 'brain'! | Experience
Apr 26, 2024 pm 04:22 PM
Cloud Whale Xiaoyao 001 sweeping and mopping robot has a 'brain'! | Experience
Apr 26, 2024 pm 04:22 PM
Sweeping and mopping robots are one of the most popular smart home appliances among consumers in recent years. The convenience of operation it brings, or even the need for no operation, allows lazy people to free their hands, allowing consumers to "liberate" from daily housework and spend more time on the things they like. Improved quality of life in disguised form. Riding on this craze, almost all home appliance brands on the market are making their own sweeping and mopping robots, making the entire sweeping and mopping robot market very lively. However, the rapid expansion of the market will inevitably bring about a hidden danger: many manufacturers will use the tactics of sea of machines to quickly occupy more market share, resulting in many new products without any upgrade points. It is also said that they are "matryoshka" models. Not an exaggeration. However, not all sweeping and mopping robots are
 Ten humanoid robots shaping the future
Mar 22, 2024 pm 08:51 PM
Ten humanoid robots shaping the future
Mar 22, 2024 pm 08:51 PM
The following 10 humanoid robots are shaping our future: 1. ASIMO: Developed by Honda, ASIMO is one of the most well-known humanoid robots. Standing 4 feet tall and weighing 119 pounds, ASIMO is equipped with advanced sensors and artificial intelligence capabilities that allow it to navigate complex environments and interact with humans. ASIMO's versatility makes it suitable for a variety of tasks, from assisting people with disabilities to delivering presentations at events. 2. Pepper: Created by Softbank Robotics, Pepper aims to be a social companion for humans. With its expressive face and ability to recognize emotions, Pepper can participate in conversations, help in retail settings, and even provide educational support. Pepper's
 Is robotic IoT the future of manufacturing?
Mar 01, 2024 pm 06:10 PM
Is robotic IoT the future of manufacturing?
Mar 01, 2024 pm 06:10 PM
Robotic IoT is an emerging development that promises to bring together two valuable technologies: industrial robots and IoT sensors. Will the Internet of Robotic Things become mainstream in manufacturing? What is the Internet of Robotic Things? The Internet of Robotic Things (IoRT) is a form of network that connects robots to the Internet. These robots use IoT sensors to collect data and interpret their surroundings. They are often combined with various technologies such as artificial intelligence and cloud computing to speed up data processing and optimize resource utilization. The development of IoRT enables robots to sense and respond to environmental changes more intelligently, bringing more efficient solutions to various industries. By integrating with IoT technology, IoRT can not only realize autonomous operation and self-learning, but also
