

Adversarial attacks and defenses in deep reinforcement learning

01 Foreword
This paper is about the work of deep reinforcement learning to resist attacks. In this paper, the author studies the robustness of deep reinforcement learning strategies to adversarial attacks from the perspective of robust optimization. Under the framework of robust optimization, the optimal adversarial attack is given by minimizing the expected return of the strategy, and accordingly, a good defense mechanism is achieved by improving the performance of the strategy in coping with the worst case scenario.
Considering that attackers are usually unable to attack in the training environment, the author proposes a greedy attack algorithm that attempts to minimize the expected return of the strategy without interacting with the environment; in addition, the author also proposes a A defense algorithm that uses max-min games to conduct adversarial training of deep reinforcement learning algorithms.
The experimental results in the Atari game environment show that the adversarial attack algorithm proposed by the author is more effective than the existing attack algorithm, and the strategy return rate is worse. The strategies generated by the adversarial defense algorithm proposed in the paper are more robust to a range of adversarial attacks than existing defense methods.
02 Preliminary knowledge
2.1 Adversarial attack
Given any sample (x, y) and neural network f, the optimization goal of generating an adversarial sample is:

where is the parameter of the neural network f, L is the loss function, is the adversarial perturbation set,  is the norm constraint ball with x as the center and as the radius. The calculation formula for generating adversarial samples through PGD attacks is as follows:
is the norm constraint ball with x as the center and as the radius. The calculation formula for generating adversarial samples through PGD attacks is as follows:

where  represents the projection operation. If the input is outside the norm sphere, the input will be projected On the sphere with x center and as the radius, represents the single-step disturbance size of the PGD attack.
represents the projection operation. If the input is outside the norm sphere, the input will be projected On the sphere with x center and as the radius, represents the single-step disturbance size of the PGD attack.
2.2 Reinforcement Learning and Policy Gradients
A reinforcement learning problem can be described as a Markov decision process. The Markov decision process can be defined as a  quintuple, where S represents a state space, A represents an action space,
quintuple, where S represents a state space, A represents an action space,  represents the state transition probability, and r represents The reward function represents the discount factor. The goal of strong learning learning is to learn a parameter policy distribution
represents the state transition probability, and r represents The reward function represents the discount factor. The goal of strong learning learning is to learn a parameter policy distribution to maximize the value function
to maximize the value function

where represents the initial state. Strong learning involves evaluating the action value function

The above formula describes the mathematical expectation of obeying the policy after the state is executed. It can be seen from the definition that the value function and the action value function satisfy the following relationship:

#For ease of expression, the author mainly focuses on the Markov process of the discrete action space, but all algorithms and results can be applied directly to successive settings.
03 Paper Method
The adversarial attack and defense of deep reinforcement learning strategies are based on the framework of robust optimization PGD

where represents  , represents the set of adversarial perturbation sequences
, represents the set of adversarial perturbation sequences  , and for all
, and for all  , satisfying
, satisfying  The above formula provides a unified framework for deep reinforcement learning to combat attacks and defenses.
The above formula provides a unified framework for deep reinforcement learning to combat attacks and defenses.
On the one hand, internal minimization optimization seeks to find confrontational perturbation sequences that make the current strategy make wrong decisions. On the other hand, the purpose of external maximization is to find the strategy distribution parameters to maximize the expected return under the perturbation strategy. After the above adversarial attacks and defense games, the strategy parameters during the training process will be more resistant to adversarial attacks.
The purpose of internal minimization of the objective function is to generate adversarial perturbations, but for reinforcement learning algorithms to learn the optimal adversarial perturbations is very time-consuming and labor-intensive, and because the training environment is a threat to the attacker It is black box, so in this paper, the author considers a practical setting, that is, the attacker injects perturbations in different states. In the supervised learning attack scenario, the attacker only needs to trick the classifier model to make it misclassify and produce wrong labels; in the reinforcement learning attack scenario, the action value function provides the attacker with additional information, that is, a small behavior value will Resulting in a small expected return. Correspondingly, the author defines the optimal adversarial perturbation in deep reinforcement learning as follows
Definition 1: An optimal adversarial perturbation on state s can minimize the expected return of the state

It should be noted that optimizing and solving the above formula is very tricky. It needs to ensure that the attacker can deceive the agent into choosing the worst decision-making behavior. However, for the attacker, the agent The action value function is agnostic, so there is no guarantee that it will be optimal against perturbations. The following theorem can show that if the policy is optimal, the optimal adversarial perturbation can be generated without accessing the action value function
Theorem 1: When the control strategy  is optimal, the action value The function and strategy satisfy the following relationship
is optimal, the action value The function and strategy satisfy the following relationship

where represents the policy entropy, is a state-dependent constant, and when changes to 0, it will also change to 0, Furthermore, the following formula
proves: When the random strategy  reaches the optimal, the value function
reaches the optimal, the value function  also reaches the optimal, which means that in each state s, it is impossible to find to any other behavioral distribution such that the value function
also reaches the optimal, which means that in each state s, it is impossible to find to any other behavioral distribution such that the value function  increases. Correspondingly, given the optimal action value function
increases. Correspondingly, given the optimal action value function , the optimal strategy can be obtained by solving the constrained optimization problem
, the optimal strategy can be obtained by solving the constrained optimization problem
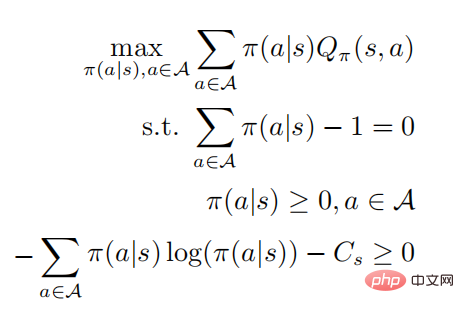
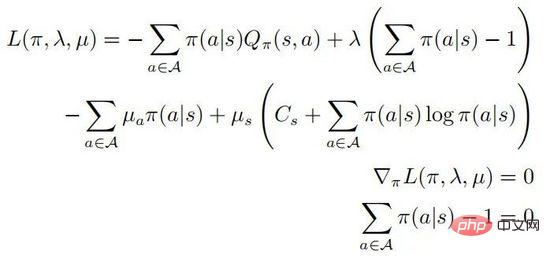
The second and third lines represents a probability distribution, and the last line represents that the strategy is a random strategy. According to the KKT condition, the above optimization problem can be transformed into the following form:
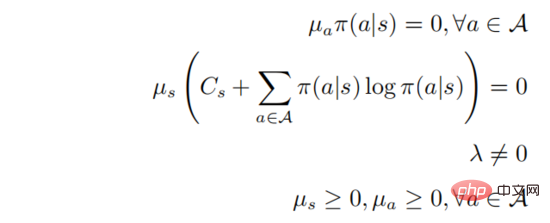
in . Assume that
. Assume that  is positive definite for all actions
is positive definite for all actions  , then:
, then:

When  , then there must be
, then there must be  , and then for any ’s
, and then for any ’s  , then there is
, then there is  , thus we will get the relationship between the action value function and the softmax of the strategy
, thus we will get the relationship between the action value function and the softmax of the strategy
 , and then there is
, and then there is
Bringing the first equation above into the second equation, we have
where
In the above formula,  represents a probability distribution in the form of softmax, and its entropy is equal to . When is equal to 0, also becomes 0. In this case, is greater than 0, then
represents a probability distribution in the form of softmax, and its entropy is equal to . When is equal to 0, also becomes 0. In this case, is greater than 0, then  at this time.
at this time.
Theorem 1 shows that if the strategy is optimal, the optimal perturbation can be obtained by maximizing the cross-entropy of the perturbation strategy and the original strategy. For the simplicity of discussion, the author calls the attack of Theorem 1 a strategic attack, and the author uses the PGD algorithm framework to calculate the optimal strategic attack. The specific algorithm flow chart is shown in Algorithm 1 below.
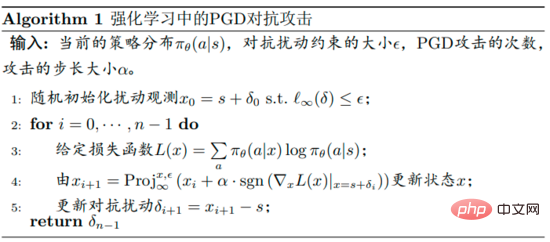
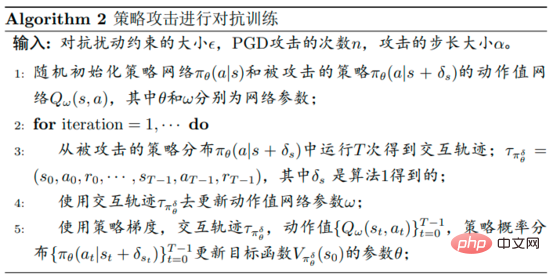
The flow chart of the robust optimization algorithm for defense against perturbation proposed by the author is shown in Algorithm 2 below. This algorithm is called strategic attack adversarial training. During the training phase, the perturbation policy is used to interact with the environment, while the action value function  of the perturbation policy is estimated to aid policy training.
of the perturbation policy is estimated to aid policy training.
The specific details are that the author first uses strategic attacks to generate perturbations during the training phase, even though the value function is not guaranteed to be reduced. In the early stages of training, the policy may not be related to the action value function. As training progresses, they will gradually satisfy the softmax relationship.
On the other hand the authors need to accurately estimate the action value function It is difficult to handle because the trajectories are collected by running the perturbed policy, and using these data to estimate the action value function of the unperturbed policy can be very Inaccurate.
It is difficult to handle because the trajectories are collected by running the perturbed policy, and using these data to estimate the action value function of the unperturbed policy can be very Inaccurate.
The objective function of the optimized perturbation strategy  using PPO is
using PPO is
where  , and
, and  is an estimate of the average function
is an estimate of the average function  of the perturbation strategy. In practice,
of the perturbation strategy. In practice,  is estimated by the method GAE. The specific algorithm flow chart is shown in the figure below.
is estimated by the method GAE. The specific algorithm flow chart is shown in the figure below.
04 Experimental results
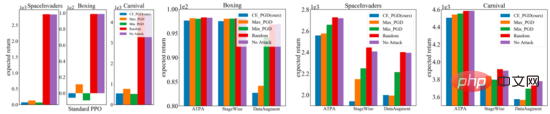
The three sub-figures on the right below show the results of different attack perturbations. It can be found that both the inversely trained policy and the standard policy are resistant to random perturbations. In contrast, adversarial attacks degrade the performance of different strategies. The results depend on the test environment and defense algorithm, and further it can be found that the performance gap between the three adversarial attack algorithms is small.
In contrast, in relatively difficult settings, the strategy proposed by the paper's authors to attack algorithm interference produces much lower returns. Overall, the strategic attack algorithm proposed in the paper produces the lowest reward in most cases, indicating that it is indeed the most efficient of all tested adversarial attack algorithms.
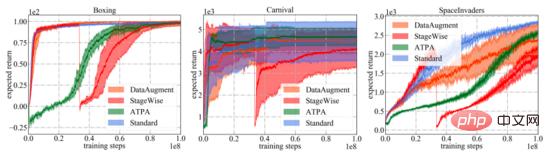
The following figure shows the learning curves of different defense algorithms and standard PPO. It is important to note that the performance curve only represents the expected return of the strategy used to interact with the environment. Among all training algorithms, ATPA proposed in the paper has the lowest training variance and is therefore more stable than other algorithms. Also notice that ATPA progresses much slower than standard PPO, especially in the early training stages. This leads to the fact that in the early stages of training, being disturbed by adverse factors can make policy training very unstable.
#The table summarizes the expected returns of the strategy under different perturbations using different algorithms. It can be found that ATPA-trained strategies are resistant to various adversarial interferences. In comparison, although StageWise and DataAugment have learned to handle adversarial attacks to some extent, they are not as effective as ATPA in all cases.
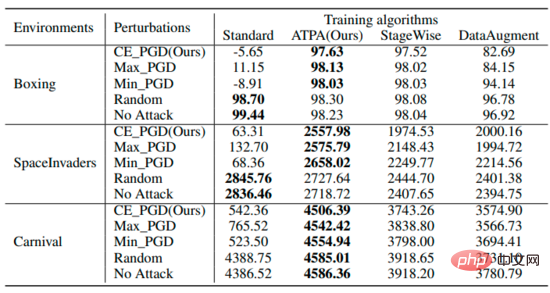
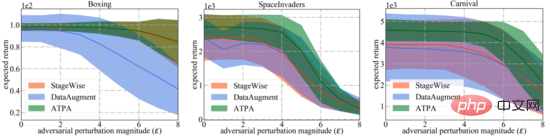
For a broader comparison, the authors also evaluate the robustness of these defense algorithms to varying degrees of adversarial interference generated by the most effective strategic attack algorithms. As shown below, ATPA once again received the highest scores in all cases. In addition, the evaluation variance of ATPA is much smaller than that of StageWise and DataAugment, indicating that ATPA has stronger generative ability.
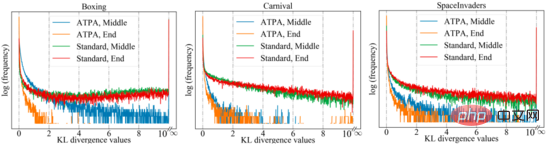
To achieve similar performance, ATPA requires more training data than the standard PPO algorithm. The authors delve into this issue by studying the stability of the perturbation strategy. The authors calculated the KL divergence values of the perturbation policy obtained by performing policy attacks using PGD with different random initial points in the middle and at the end of the training process. As shown in the figure below, without adversarial training, large KL divergence values are continuously observed even if the standard PPO has converged, indicating that the policy is very unstable to the perturbations produced by performing PGD with different initial points.
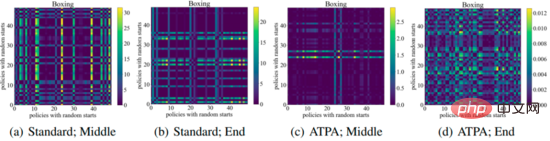
The following figure shows the KL divergence plot of the perturbation strategy with different initial points. It can be found that each pixel in the figure represents the KL divergence value of the two perturbation strategies. , these two perturbation strategies are given by maximizing the core formula of the ATPA algorithm. Note that since KL divergence is an asymmetric metric, these mappings are also asymmetric.
The above is the detailed content of Adversarial attacks and defenses in deep reinforcement learning. For more information, please follow other related articles on the PHP Chinese website!

Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

Video Face Swap
Swap faces in any video effortlessly with our completely free AI face swap tool!

Hot Article
Hot Tools

Notepad++7.3.1
Easy-to-use and free code editor

SublimeText3 Chinese version
Chinese version, very easy to use

Zend Studio 13.0.1
Powerful PHP integrated development environment

Dreamweaver CS6
Visual web development tools

SublimeText3 Mac version
God-level code editing software (SublimeText3)
Hot Topics



 Methods and steps for using BERT for sentiment analysis in Python
Jan 22, 2024 pm 04:24 PM
Methods and steps for using BERT for sentiment analysis in Python
Jan 22, 2024 pm 04:24 PM
BERT is a pre-trained deep learning language model proposed by Google in 2018. The full name is BidirectionalEncoderRepresentationsfromTransformers, which is based on the Transformer architecture and has the characteristics of bidirectional encoding. Compared with traditional one-way coding models, BERT can consider contextual information at the same time when processing text, so it performs well in natural language processing tasks. Its bidirectionality enables BERT to better understand the semantic relationships in sentences, thereby improving the expressive ability of the model. Through pre-training and fine-tuning methods, BERT can be used for various natural language processing tasks, such as sentiment analysis, naming
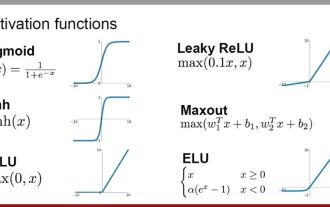 Analysis of commonly used AI activation functions: deep learning practice of Sigmoid, Tanh, ReLU and Softmax
Dec 28, 2023 pm 11:35 PM
Analysis of commonly used AI activation functions: deep learning practice of Sigmoid, Tanh, ReLU and Softmax
Dec 28, 2023 pm 11:35 PM
Activation functions play a crucial role in deep learning. They can introduce nonlinear characteristics into neural networks, allowing the network to better learn and simulate complex input-output relationships. The correct selection and use of activation functions has an important impact on the performance and training results of neural networks. This article will introduce four commonly used activation functions: Sigmoid, Tanh, ReLU and Softmax, starting from the introduction, usage scenarios, advantages, disadvantages and optimization solutions. Dimensions are discussed to provide you with a comprehensive understanding of activation functions. 1. Sigmoid function Introduction to SIgmoid function formula: The Sigmoid function is a commonly used nonlinear function that can map any real number to between 0 and 1. It is usually used to unify the
 Latent space embedding: explanation and demonstration
Jan 22, 2024 pm 05:30 PM
Latent space embedding: explanation and demonstration
Jan 22, 2024 pm 05:30 PM
Latent Space Embedding (LatentSpaceEmbedding) is the process of mapping high-dimensional data to low-dimensional space. In the field of machine learning and deep learning, latent space embedding is usually a neural network model that maps high-dimensional input data into a set of low-dimensional vector representations. This set of vectors is often called "latent vectors" or "latent encodings". The purpose of latent space embedding is to capture important features in the data and represent them into a more concise and understandable form. Through latent space embedding, we can perform operations such as visualizing, classifying, and clustering data in low-dimensional space to better understand and utilize the data. Latent space embedding has wide applications in many fields, such as image generation, feature extraction, dimensionality reduction, etc. Latent space embedding is the main
 Beyond ORB-SLAM3! SL-SLAM: Low light, severe jitter and weak texture scenes are all handled
May 30, 2024 am 09:35 AM
Beyond ORB-SLAM3! SL-SLAM: Low light, severe jitter and weak texture scenes are all handled
May 30, 2024 am 09:35 AM
Written previously, today we discuss how deep learning technology can improve the performance of vision-based SLAM (simultaneous localization and mapping) in complex environments. By combining deep feature extraction and depth matching methods, here we introduce a versatile hybrid visual SLAM system designed to improve adaptation in challenging scenarios such as low-light conditions, dynamic lighting, weakly textured areas, and severe jitter. sex. Our system supports multiple modes, including extended monocular, stereo, monocular-inertial, and stereo-inertial configurations. In addition, it also analyzes how to combine visual SLAM with deep learning methods to inspire other research. Through extensive experiments on public datasets and self-sampled data, we demonstrate the superiority of SL-SLAM in terms of positioning accuracy and tracking robustness.
 Super strong! Top 10 deep learning algorithms!
Mar 15, 2024 pm 03:46 PM
Super strong! Top 10 deep learning algorithms!
Mar 15, 2024 pm 03:46 PM
Almost 20 years have passed since the concept of deep learning was proposed in 2006. Deep learning, as a revolution in the field of artificial intelligence, has spawned many influential algorithms. So, what do you think are the top 10 algorithms for deep learning? The following are the top algorithms for deep learning in my opinion. They all occupy an important position in terms of innovation, application value and influence. 1. Deep neural network (DNN) background: Deep neural network (DNN), also called multi-layer perceptron, is the most common deep learning algorithm. When it was first invented, it was questioned due to the computing power bottleneck. Until recent years, computing power, The breakthrough came with the explosion of data. DNN is a neural network model that contains multiple hidden layers. In this model, each layer passes input to the next layer and
 Understand in one article: the connections and differences between AI, machine learning and deep learning
Mar 02, 2024 am 11:19 AM
Understand in one article: the connections and differences between AI, machine learning and deep learning
Mar 02, 2024 am 11:19 AM
In today's wave of rapid technological changes, Artificial Intelligence (AI), Machine Learning (ML) and Deep Learning (DL) are like bright stars, leading the new wave of information technology. These three words frequently appear in various cutting-edge discussions and practical applications, but for many explorers who are new to this field, their specific meanings and their internal connections may still be shrouded in mystery. So let's take a look at this picture first. It can be seen that there is a close correlation and progressive relationship between deep learning, machine learning and artificial intelligence. Deep learning is a specific field of machine learning, and machine learning
 From basics to practice, review the development history of Elasticsearch vector retrieval
Oct 23, 2023 pm 05:17 PM
From basics to practice, review the development history of Elasticsearch vector retrieval
Oct 23, 2023 pm 05:17 PM
1. Introduction Vector retrieval has become a core component of modern search and recommendation systems. It enables efficient query matching and recommendations by converting complex objects (such as text, images, or sounds) into numerical vectors and performing similarity searches in multidimensional spaces. From basics to practice, review the development history of Elasticsearch vector retrieval_elasticsearch As a popular open source search engine, Elasticsearch's development in vector retrieval has always attracted much attention. This article will review the development history of Elasticsearch vector retrieval, focusing on the characteristics and progress of each stage. Taking history as a guide, it is convenient for everyone to establish a full range of Elasticsearch vector retrieval.
 AlphaFold 3 is launched, comprehensively predicting the interactions and structures of proteins and all living molecules, with far greater accuracy than ever before
Jul 16, 2024 am 12:08 AM
AlphaFold 3 is launched, comprehensively predicting the interactions and structures of proteins and all living molecules, with far greater accuracy than ever before
Jul 16, 2024 am 12:08 AM
Editor | Radish Skin Since the release of the powerful AlphaFold2 in 2021, scientists have been using protein structure prediction models to map various protein structures within cells, discover drugs, and draw a "cosmic map" of every known protein interaction. . Just now, Google DeepMind released the AlphaFold3 model, which can perform joint structure predictions for complexes including proteins, nucleic acids, small molecules, ions and modified residues. The accuracy of AlphaFold3 has been significantly improved compared to many dedicated tools in the past (protein-ligand interaction, protein-nucleic acid interaction, antibody-antigen prediction). This shows that within a single unified deep learning framework, it is possible to achieve
