
 Technology peripherals
AI
How difficult is it for a robot to master the strength of its hands and do housework safely? 1X Artificial Intelligence Vice President writes a detailed explanation
Technology peripherals
AI
How difficult is it for a robot to master the strength of its hands and do housework safely? 1X Artificial Intelligence Vice President writes a detailed explanation
How difficult is it for a robot to master the strength of its hands and do housework safely? 1X Artificial Intelligence Vice President writes a detailed explanation



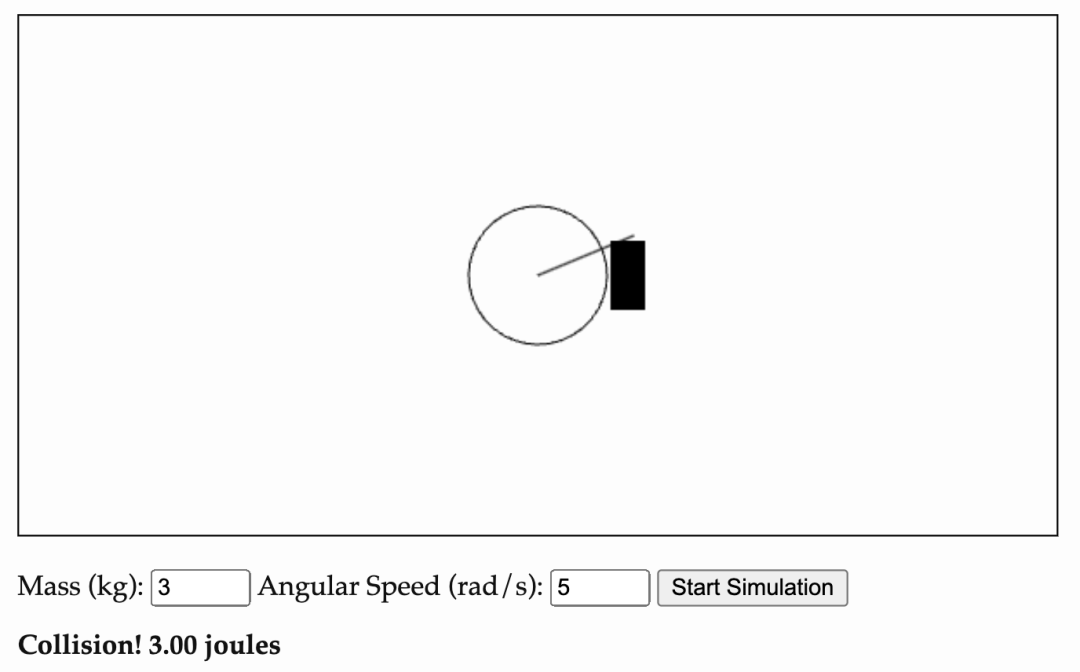
 , where I is the moment of inertia and ω is the angular velocity. Because the lever is assumed to have no mass, the inertia of the system is equivalent to that of a fixed cylinder:
, where I is the moment of inertia and ω is the angular velocity. Because the lever is assumed to have no mass, the inertia of the system is equivalent to that of a fixed cylinder:  . Plugging in the values gives us I = 0.24 kg⋅m^2. Therefore, the rotational kinetic energy of this system can be further calculated to be 3 Joules.
. Plugging in the values gives us I = 0.24 kg⋅m^2. Therefore, the rotational kinetic energy of this system can be further calculated to be 3 Joules. 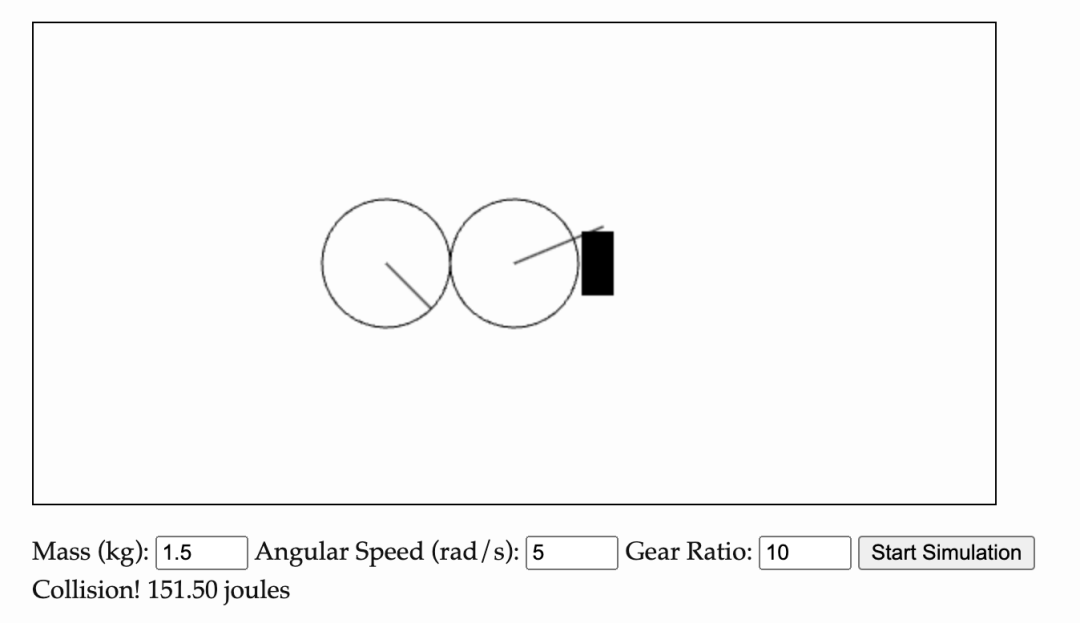

その理由は、ギアボックスが重要な機械的レバレッジを提供するためです。多くのモーターは単独で動作すると十分なトルクを提供できないため、エンジニアは高速モーターにギアを取り付けます。必要なトルクを犠牲にしています。
この種の歯車システムは「剛性」があり、一度回転し始めると歯車がしっかりと噛み合い、逆駆動することが困難になります。引き返してください。そのため、ギアボックスのもう一方の端では、高速モーターによって生成される回転力に抵抗するために、より多くの力を加える必要があります。
上記の考慮事項に基づいて、1X Technologies は過去 10 年間、トランスミッション システムの安全性を最大限に高めるために高トルク、低速モーターの製造に取り組んできました。 NEO ロボットは、ギア比が小さく軽量なモーターと駆動システムを採用しているため、家庭環境に安全に組み込むことができる初の真の家庭用ロボットとなっています。
1.一般的なロボットの進歩がボトルネックになっている。ロボットのハードウェアは高価ですが、かさばるハードウェアを使用してタスクを実行するために人間のリモート オペレーターを雇うのも同様に高価です。さらに、遠隔操作の効率は非常に低く、人間が直接タスクを完了できる速度よりもはるかに遅いです。
2. ヘッドマウント カメラを人々にストラップで固定し、肉を覆う大きなゴム手袋を着用してもらうと、さまざまな雑用を行っている人々の大規模なデータセットをすぐに収集できます。そしてタスク。普通の人は、日常生活の中で無意識のうちにさまざまな動作や操作タスクを実行します。生のモーション出力を直接認識することは困難ですが、ビデオ内のポーズの変化を分析することでアクションを推測できます。このタイプのデータ収集は、より高度なハードウェアが利用可能になるまで、汎用ロボットの開発の障壁を取り除くのに役立つ可能性があります。
3. インターネット上には一人称および三人称のビデオが多数あり、これらをロボットに訓練して、ビデオ内で人間が行うさまざまなアクティビティを認識および学習させることで、さらに拡張することができます。データサイズ。
この種のデータ収集を拡大する前に、5000 RPM で回転するモーターと比較して、私たちの身体には高速回転する部品がないことに注意することも重要です。 、筋肉の運動エネルギーは非常に低く、私たちが移動するときに運ぶ有効質量もはるかに小さいため、ロボットの関節角度は人間のそれとほぼ同じであっても、回転モーターによって提供される有効質量は、器用にタスクを実行するには大きすぎます。
効率的な動作制御戦略を開発したとしても、ロボットは、照明を簡単にオン/オフしたり、優雅に走ったりするなどの動作を実行する際に、依然として人間の速度と流暢さに達することはできません。これは、ロボットが物体に触れたときにかかる力が人間とは大きく異なるためです。
人間のビデオをロボットの動作戦略にすばやく変換したい場合は、次のメソッドが必要です:
1. NEO
のような非常に従順で柔軟なロボット 2. 「 」を直接コピーするのではなく、ロボットにビデオのモーション軌跡を 1 倍よりも遅い速度で追跡させます。ヒューマンハードウェア」のダイナミクス。ただし、これは静的な操作タスクにのみ適しており、衣服をたたむ、キッチンで食事を準備するなど、多くの物体との接触が必要なタスクには適していません。
3. 動作計画と動的計画を分離することで、動作計画は目標位置に到達することに重点を置き、動的計画は衝突時の力の制御に重点を置くことができます。
The above is the detailed content of How difficult is it for a robot to master the strength of its hands and do housework safely? 1X Artificial Intelligence Vice President writes a detailed explanation. For more information, please follow other related articles on the PHP Chinese website!

Hot AI Tools

Undresser.AI Undress
AI-powered app for creating realistic nude photos

AI Clothes Remover
Online AI tool for removing clothes from photos.

Undress AI Tool
Undress images for free

Clothoff.io
AI clothes remover

Video Face Swap
Swap faces in any video effortlessly with our completely free AI face swap tool!

Hot Article
Hot Tools

Notepad++7.3.1
Easy-to-use and free code editor

SublimeText3 Chinese version
Chinese version, very easy to use

Zend Studio 13.0.1
Powerful PHP integrated development environment

Dreamweaver CS6
Visual web development tools

SublimeText3 Mac version
God-level code editing software (SublimeText3)
Hot Topics
 1668
1668
 14
1426
52
1328
25
1273
29
1255
24
14
1426
52
1328
25
1273
29
1255
24

 DeepMind robot plays table tennis, and its forehand and backhand slip into the air, completely defeating human beginners
Aug 09, 2024 pm 04:01 PM
DeepMind robot plays table tennis, and its forehand and backhand slip into the air, completely defeating human beginners
Aug 09, 2024 pm 04:01 PM
But maybe he can’t defeat the old man in the park? The Paris Olympic Games are in full swing, and table tennis has attracted much attention. At the same time, robots have also made new breakthroughs in playing table tennis. Just now, DeepMind proposed the first learning robot agent that can reach the level of human amateur players in competitive table tennis. Paper address: https://arxiv.org/pdf/2408.03906 How good is the DeepMind robot at playing table tennis? Probably on par with human amateur players: both forehand and backhand: the opponent uses a variety of playing styles, and the robot can also withstand: receiving serves with different spins: However, the intensity of the game does not seem to be as intense as the old man in the park. For robots, table tennis
 The first mechanical claw! Yuanluobao appeared at the 2024 World Robot Conference and released the first chess robot that can enter the home
Aug 21, 2024 pm 07:33 PM
The first mechanical claw! Yuanluobao appeared at the 2024 World Robot Conference and released the first chess robot that can enter the home
Aug 21, 2024 pm 07:33 PM
On August 21, the 2024 World Robot Conference was grandly held in Beijing. SenseTime's home robot brand "Yuanluobot SenseRobot" has unveiled its entire family of products, and recently released the Yuanluobot AI chess-playing robot - Chess Professional Edition (hereinafter referred to as "Yuanluobot SenseRobot"), becoming the world's first A chess robot for the home. As the third chess-playing robot product of Yuanluobo, the new Guoxiang robot has undergone a large number of special technical upgrades and innovations in AI and engineering machinery. For the first time, it has realized the ability to pick up three-dimensional chess pieces through mechanical claws on a home robot, and perform human-machine Functions such as chess playing, everyone playing chess, notation review, etc.
 Claude has become lazy too! Netizen: Learn to give yourself a holiday
Sep 02, 2024 pm 01:56 PM
Claude has become lazy too! Netizen: Learn to give yourself a holiday
Sep 02, 2024 pm 01:56 PM
The start of school is about to begin, and it’s not just the students who are about to start the new semester who should take care of themselves, but also the large AI models. Some time ago, Reddit was filled with netizens complaining that Claude was getting lazy. "Its level has dropped a lot, it often pauses, and even the output becomes very short. In the first week of release, it could translate a full 4-page document at once, but now it can't even output half a page!" https:// www.reddit.com/r/ClaudeAI/comments/1by8rw8/something_just_feels_wrong_with_claude_in_the/ in a post titled "Totally disappointed with Claude", full of
 At the World Robot Conference, this domestic robot carrying 'the hope of future elderly care' was surrounded
Aug 22, 2024 pm 10:35 PM
At the World Robot Conference, this domestic robot carrying 'the hope of future elderly care' was surrounded
Aug 22, 2024 pm 10:35 PM
At the World Robot Conference being held in Beijing, the display of humanoid robots has become the absolute focus of the scene. At the Stardust Intelligent booth, the AI robot assistant S1 performed three major performances of dulcimer, martial arts, and calligraphy in one exhibition area, capable of both literary and martial arts. , attracted a large number of professional audiences and media. The elegant playing on the elastic strings allows the S1 to demonstrate fine operation and absolute control with speed, strength and precision. CCTV News conducted a special report on the imitation learning and intelligent control behind "Calligraphy". Company founder Lai Jie explained that behind the silky movements, the hardware side pursues the best force control and the most human-like body indicators (speed, load) etc.), but on the AI side, the real movement data of people is collected, allowing the robot to become stronger when it encounters a strong situation and learn to evolve quickly. And agile
 ACL 2024 Awards Announced: One of the Best Papers on Oracle Deciphering by HuaTech, GloVe Time Test Award
Aug 15, 2024 pm 04:37 PM
ACL 2024 Awards Announced: One of the Best Papers on Oracle Deciphering by HuaTech, GloVe Time Test Award
Aug 15, 2024 pm 04:37 PM
At this ACL conference, contributors have gained a lot. The six-day ACL2024 is being held in Bangkok, Thailand. ACL is the top international conference in the field of computational linguistics and natural language processing. It is organized by the International Association for Computational Linguistics and is held annually. ACL has always ranked first in academic influence in the field of NLP, and it is also a CCF-A recommended conference. This year's ACL conference is the 62nd and has received more than 400 cutting-edge works in the field of NLP. Yesterday afternoon, the conference announced the best paper and other awards. This time, there are 7 Best Paper Awards (two unpublished), 1 Best Theme Paper Award, and 35 Outstanding Paper Awards. The conference also awarded 3 Resource Paper Awards (ResourceAward) and Social Impact Award (
 1X Technologies announces its Neo bipedal humanoid is one step closer to taking over home chores
Sep 07, 2024 pm 03:31 PM
1X Technologies announces its Neo bipedal humanoid is one step closer to taking over home chores
Sep 07, 2024 pm 03:31 PM
1X Technologies has announced the Neo bipedal humanoid robot is entering beta testing at select homes this year followingits earlier unveiling. Unlike their first humanoid robot, Eve, which rolled on wheels, Neo walks about like a human on robotic le
 Li Feifei's team proposed ReKep to give robots spatial intelligence and integrate GPT-4o
Sep 03, 2024 pm 05:18 PM
Li Feifei's team proposed ReKep to give robots spatial intelligence and integrate GPT-4o
Sep 03, 2024 pm 05:18 PM
Deep integration of vision and robot learning. When two robot hands work together smoothly to fold clothes, pour tea, and pack shoes, coupled with the 1X humanoid robot NEO that has been making headlines recently, you may have a feeling: we seem to be entering the age of robots. In fact, these silky movements are the product of advanced robotic technology + exquisite frame design + multi-modal large models. We know that useful robots often require complex and exquisite interactions with the environment, and the environment can be represented as constraints in the spatial and temporal domains. For example, if you want a robot to pour tea, the robot first needs to grasp the handle of the teapot and keep it upright without spilling the tea, then move it smoothly until the mouth of the pot is aligned with the mouth of the cup, and then tilt the teapot at a certain angle. . this
 Distributed Artificial Intelligence Conference DAI 2024 Call for Papers: Agent Day, Richard Sutton, the father of reinforcement learning, will attend! Yan Shuicheng, Sergey Levine and DeepMind scientists will give keynote speeches
Aug 22, 2024 pm 08:02 PM
Distributed Artificial Intelligence Conference DAI 2024 Call for Papers: Agent Day, Richard Sutton, the father of reinforcement learning, will attend! Yan Shuicheng, Sergey Levine and DeepMind scientists will give keynote speeches
Aug 22, 2024 pm 08:02 PM
Conference Introduction With the rapid development of science and technology, artificial intelligence has become an important force in promoting social progress. In this era, we are fortunate to witness and participate in the innovation and application of Distributed Artificial Intelligence (DAI). Distributed artificial intelligence is an important branch of the field of artificial intelligence, which has attracted more and more attention in recent years. Agents based on large language models (LLM) have suddenly emerged. By combining the powerful language understanding and generation capabilities of large models, they have shown great potential in natural language interaction, knowledge reasoning, task planning, etc. AIAgent is taking over the big language model and has become a hot topic in the current AI circle. Au
