

轨迹预测系列 | HiVT之进化版QCNet到底讲了啥?

HiVT的进化版(不先看HiVT也能直接读这篇),性能和效率上大幅提升。
文章也很容易阅读。
【轨迹预测系列】【笔记】HiVT: Hierarchical Vector Transformer for Multi-Agent Motion Prediction - 知乎 (zhihu.com)
原文链接:
https://openaccess.thecvf.com/content/CVPR2023/papers/Zhou_Query-Centric_Trajectory_Prediction_CVPR_2023_paper.pdf
Abstract
Agent作为中心进行预测的模型存在一个问题,当窗口移动时需要多次重复normalize到agent中心,再进行重复encoding的过程,对于onboard使用是不划算的。因此对于场景的encoding我们采用了query-centric的框架,可重复使用已经计算过的结果,不依赖于全局的时间坐标系。同时,因为对于不同agent共享了场景特征,使得agent的轨迹decoding过程可更加并行化处理。
对于场景进行了复杂的编码,目前的解码方法对于mode的信息抓取还是比较困难,特别是对于长时间的预测。为了解决这个问题,我们首先使用anchor-free的query生成轨迹proposal(走一步看一步的提取特征方法),这样model能够更好利用不同时间刻位的场景特征。然后是调整模块,利用上一步得到的proposal来进行轨迹的调优(动态的anchor-based)。通过这些高质量的anchor,我们的query-based decoder可以更好地处理mode的特征。
打榜成功。这个设计也实现了场景特征encoding和并行多agent的decoding的pipeline。
Introduction
目前的轨迹预测paper有这么几个问题:
- 对于多种异构的场景信息额度处理效率低下。无人驾驶任务里,数据以一帧一帧的流给到model,包含矢量化的高精地图和周围agent的历史轨迹。最近的factorized attention方法(时空分开分别进行attentin)将这些信息的处理提升到新高度。但这需要对于每个场景元素做attention,如果场景非常复杂,cost还是很大的。
- 随着预测的时间增长,预测的不确定性也在爆炸式增长。比如在路口的车可能直行或转弯。为了避免错过潜在的可能性,模型需要获取多mode的分布,而不是仅仅只预测出现频率最高的mode。但是gt只有一个,没法对多个可能性进行比较好的学习。有些paper提出了多个手捏的anchor来监督的做法,这个效果就完全取决于anchor的质量高低了。当anchor无法准确cover gt时,这个做法就很糟糕了。也有别的做法直接预测多mode,忽视了mode塌缩和训练不稳定的问题。
为了解决上述问题,我们提出了QCNet。
首先,我们想要在利用好强大的factorized attention的同时,提高onboard的inference速度。过去的agent-centric encoding办法显然不行。当下一帧数据到来,窗口就会移动,但还是和上一帧有很大部分重叠的,所以我们有机会重复使用这些feature。但是agent-centric办法需要转到agent坐标系,导致其必须要重新encode场景。为了解决这个问题,我们使用了query-centric的办法:场景元素在它们自己的时空坐标系内进行特征提取,和全局坐标系无关(ego在哪无关了)。(高精地图可以用因为地图元素有长久的id,非高精地图应该就不好用了,地图元素的得在前后帧tracking住)
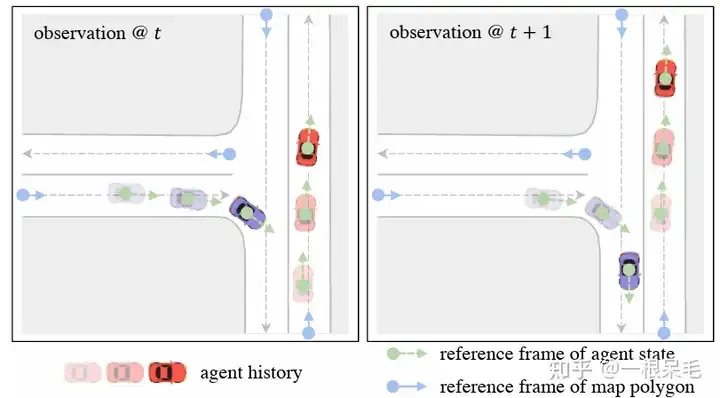
这使得我们可以把之前处理好的encoding结果进行重复使用,对于agent来说直接用这些cache的feature,这样就能节省latency了。
其次,为了更好地用这些场景encode结果进行多mode长时间预测,我们使用了anchor-free的query来一步步(在上一个位置的地方)提取场景的feature,这样每一次的decode都是非常短的一步。这个做法可以使得对于场景的特征提取重心放在agent未来在的某一个位置,而不是为了考虑未来多个时刻的位置,去提取远处的feature。这样得到的高质量anchor会在下一个refine的module进行精细调整。这样结合了anchor-free和anchor-based的做法充分利用了两个办法的优点,实现多mode长时间的预测。
这个做法是第一个探索了轨迹预测的连续性来实现高速inference的办法。同时decoder部分也兼顾了多mode和长时间预测的任务。
Approach
Input and Output
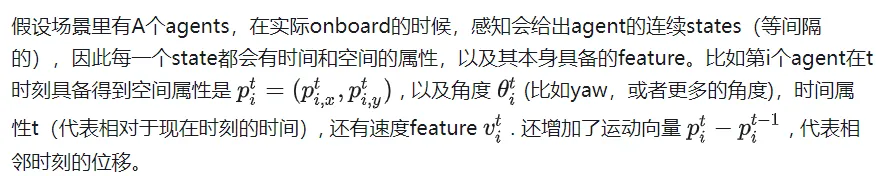
同时prediction模块还可以从高精地图获得M个polygon,每一个polygon都有多个点以及语义信息(crosswalk,lane等类型)。
预测模块使用T个时刻的上述的agent state和地图信息,要给出K个总共T'长度预测轨迹,同时还有其概率分布。
Query-Centric Scene Context Encoding
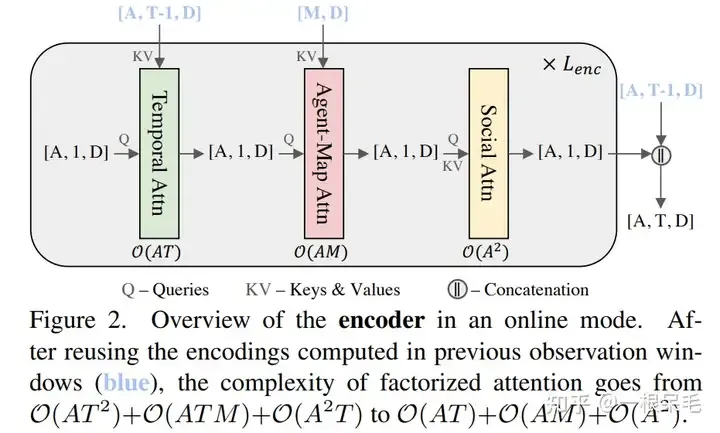
第一步自然是场景的encode。目前流行的factorized attention(时间和空间维度分别做attention)是这么做的,具体来说一共有三步:
- 时间维度attention,时间复杂度O(A),每个agent自己的时间维度矩阵乘法
- agent和map的cross attention,时间复杂度O(ATM),在每个时刻,agent和地图元素的矩阵乘法
- agent和agent间的attention,时间复杂度O(T), 在每个时刻,agent和agent矩阵乘法
这个做法和之前的先在时间维度压缩feature到当前时刻,再agent和agent,agent和地图间交互的做法比起来,是对于过去每个时刻去做交互,因此可以获取更多信息,比如agent和map间在每个时刻的交互演变。
但是缺点是三次方的复杂度随着场景变复杂,元素变多,会变得很大。我们的目标就是既用好这个factorized attention,同时不让时间复杂度这么容易爆炸。
一个很容易想到的办法是利用上一帧的结果,因为在时间维度上其实有T-1帧是完全重复的。但因为我们需要把这些feature旋转平移到agent当前帧的的位置和朝向,因此没法就这么使用上一帧运算得到的结果。
为了解决坐标系的问题,采用了query-centric办法,来学习场景元素的特征,而不依赖它们的全局坐标。这个做法对每个场景元素建立了局部的时空坐标系,在这个坐标系内提取特征,即使ego到别处,这个局部提取出来的特征也是不变的。这个局部时空坐标系自然也有一个原点位置和方向,这位置信息作为key,提取出来的特征作为value,便于之后的attention操作。整个做法分为下面几步:
Local Spacetime Coordinate System
对于agent i在t时刻的feature来说,选择这个时刻的位置和朝向作为参考系。对于map元素来说,则采用这个元素的起始点作为参考系。这样的参考系选择方法可以在ego移动后提取的feature保持不变。
Scene Element Embedding
对于每个元素内的别的向量特征,都在上述参考系里获取极坐标表示表达。然后将它们转成傅里叶特征来获取高频信号。concat上语义特征后再MLP获取特征。对于map元素,为了保证内部点的顺序不相关性,先做attention后pooling的操作。最后获得agent特征为[A, T, D], map特征为[M, D]. D是特征维度,保持一致才可以方便attention的矩阵相乘。这样提取出来的特征可以使得ego处于任何地方都能使用。
傅里叶embedding: 制造正态分布的embedding,对应各种频率的权重,乘输入和2Π, 最后取cos和sin作为feature。直观理解的话应该是把输入当作一个信号,把信号解码成多个基本信号(多个频率的信号)。这样可以更好的抓取高频信号,高频信号对于结果的精细程度很重要,一般的做法容易丢精细的高频信号。值得注意的是对于noisy数据不建议使用,因为会误抓错误的高频信号。(感觉有点像overfit,不能太general但又不能精准过头)
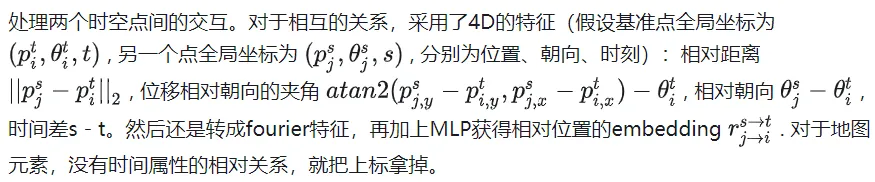
Relative Spatial-Temporal Positional Embedding
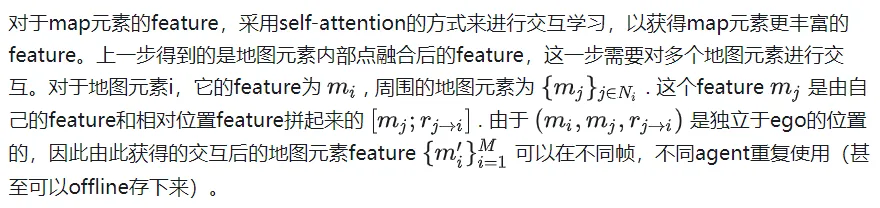
Self-Attention for Map Encoding
Factorized Attention for Agent Encoding



附近的定义为agent周围50m范围内。一共会进行次。
值得注意的是,通过以上方法得到的feature具备了时空不变性,即不管ego在什么时刻到什么地方,上述feature都是不变的,因为都没有针对当前的位置信息进行平移旋转。由于相比于上一帧只是多了新的一帧数据,并不需要计算之前的时刻的feature,所以总的计算复杂度除以了T。
Query-Based Trajectory Decoding
类似于DETR的anchor-free query去某些key value里做attention的办法会导致训练不稳定,模态塌缩的问题,同时长时间预测也不靠谱,因为不确定度会在靠后时间爆炸。因此此模型采用了先来一次粗的anchor-free query办法,再对这个输出进行refine的anchor-base办法。
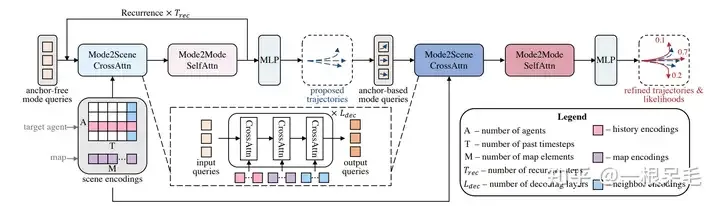 整个网络结构
整个网络结构
Mode2Scene and Mode2Mode Attention
Mode2Scene的两步都采用了DETR结构:query为K个轨迹mode(粗的proposal步是直接随机生成的,refine步是由proposal步得到的feature作为输入),然后在场景feature(agent历史,map,周围agent)上做多次cross attention。
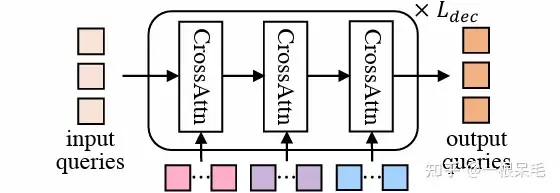 DETR结构
DETR结构
Mode2Mode则是在K个mode间进行self attention,企图实现mode间的diverse,不要都聚在一起。
Reference Frames of Mode Queries
为了并行预测多个agent的轨迹,场景的encoding是被多个agent分享的。因为场景feature都是相对于自身的feature,所以要使用的话还是得转到agent的视角下。对于mode的query,会附加上agent的位置和朝向信息。和之前encode相对位置类似的操作,也会对场景元素和agent的相对位置的信息进行embedding作为key和value。(直观上说就是agent每个mode在附近信息使用上的一个加权注意力)
Anchor-Free Trajectory Proposal
第一次是anchor free的办法,采用可以学习的query来制造相对低质量的轨迹proposal,一共会产生K个proposal。由于会用cross attention的方式从场景信息里提取特征,因此可以高效产生比较少而有效的anchor供第二次refine使用。self attention则使得各proposal总体会更diverse。

Anchor-Based Trajectory Refinement
anchor free的办法虽然比较简单,但也存在训练不稳定的问题,有可能mode塌缩。同时,随机生成的mode还需要能在全场景里对于不同agent都有不错的表现,这比较难,很容易生成出不符合运动学的或者不符合交通的轨迹proposal。因此我们想到可以再来一次anchor-based修正。在proposal的基础上预测了一个offset(加到原proposal获得修正后轨迹),并预测了每个新轨迹的概率。
这个模块同样使用了DETR的形式,每个mode的query都是用上一步的proposal来提取,具体是用了一个小的GRU来embed每个anchor(一步步往前走),使用到最后一个时刻的feature作为query。这些基于anchor的query可以提供一定的空间信息,使得attention时更容易捕捉有用的信息。
Training Objectives
和HiVT一样(参考HiVT的分析),采用Laplace分布。直白的讲就是把每个mode下每个时刻建模为一个laplace分布(参考一般的高斯分布,由mean和var,代表这个点的位置和其不确定性)。并且认为时刻之间是独立的(直接连乘)。Π代表了对应mode的概率。

Loss的话由3部分组成

主要分为两部分:分类loss和回归loss。
分类loss是指预测概率的loss,这个地方要注意的是需要打断梯度回传,不可以让概率的引起的梯度传到对于坐标的预测(即在假设每个mode预测位置为合理的前提下)。label则是最接近gt的为1,别的都是0。
回归loss有两个,一个是一阶段的proposal的loss,一个是二阶段的refine的loss。采用赢者通吃的办法,即只计算最接近gt的mode的loss,两个阶段的回归loss都要算。为了训练的稳定性,此处在两个阶段中也打断了梯度回传,使得proposal学习就专门学习proposal,refine就只学refine。
Experiments
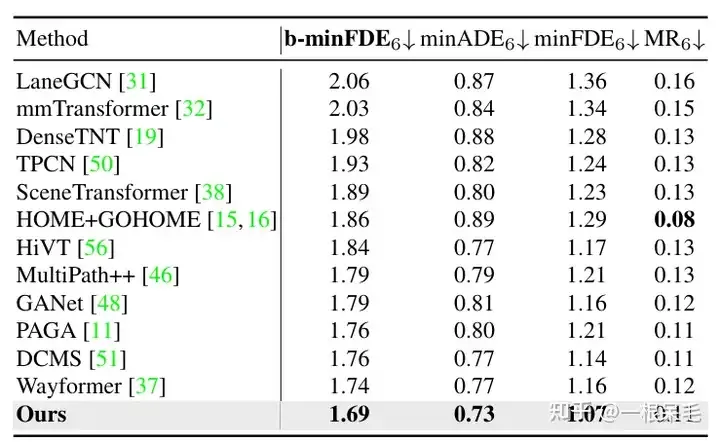
Argoverse2基本各项SOTA(* 表示使用了ensemble技巧)
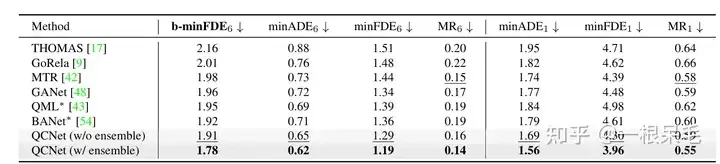
b-minFDE相比minFDE的区别在于额外乘上了和其概率相关的系数. 即目标希望FDE最小的那条轨迹的概率越高越好。
关于ensemble技巧,感觉是有点作弊的:可以参考BANet里的介绍,下面简单介绍一下。
生成轨迹的最后一步同时连做好多遍结构一样的submodel(decoder),会给出多组预测,比如有7个submodel,每个有6条预测,一共42条。然后用kmeans来进行聚类(以最后一个坐标点为聚类标准),目标是6组,每组7条,然后每组里面进行加权平均获得新轨迹。
加权方法如下,为当前轨迹和gt的b-minFDE,c为当前轨迹的概率,在每组里面进行权重计算,然后对轨迹坐标加权求和获得一条新轨迹。(感觉多少有些tricky,因为c其实是这个轨迹在submodel输出里的概率,拿来在聚类里算有点不太符合预期)
并且这么操作后新轨迹的概率也很难精准计算,不能用上述方法,否则总概率和就不一定是1了。似乎也只能等权重地算聚类里的概率了。
Argoverse1也是遥遥领先
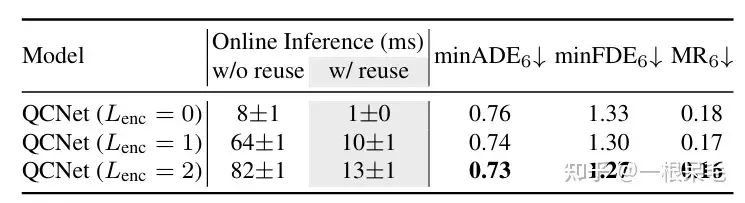
关于场景encode的研究:如果复用了之前的场景encode结果,infer的时间可以大幅减少。agent和场景信息的factorized attention交互次数变多,预测效果也会变好,只是latency也涨的很凶,需要权衡。
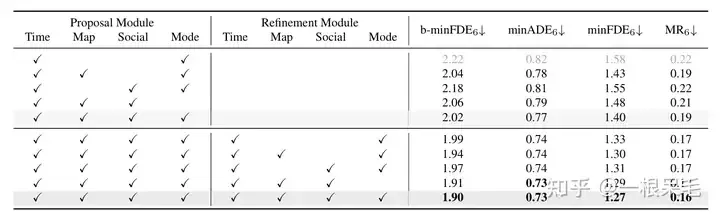
各种操作的研究:证明了refine的重要性,以及factorized attention在各种交互中的重要性,缺一不可。
以上是轨迹预测系列 | HiVT之进化版QCNet到底讲了啥?的详细内容。更多信息请关注PHP中文网其他相关文章!

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

Video Face Swap
使用我们完全免费的人工智能换脸工具轻松在任何视频中换脸!

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)



 sql if语句怎么用
Apr 09, 2025 pm 06:12 PM
sql if语句怎么用
Apr 09, 2025 pm 06:12 PM
SQL IF 语句用于有条件地执行 SQL 语句,语法为: IF (condition) THEN {语句} ELSE {语句} END IF;。条件可以是任何有效的 SQL 表达式,如果条件为真,执行 THEN 子句;如果条件为假,执行 ELSE 子句。IF 语句可以嵌套,允许更复杂的条件检查。
 如何解决Vue Axios跨域导致的"Network Error"
Apr 07, 2025 pm 10:27 PM
如何解决Vue Axios跨域导致的"Network Error"
Apr 07, 2025 pm 10:27 PM
解决 Vue Axios 跨域问题的方法包括:服务器端配置 CORS 头使用 Axios 代理使用 JSONP使用 WebSocket使用 CORS 插件
 apache怎么配置zend
Apr 13, 2025 pm 12:57 PM
apache怎么配置zend
Apr 13, 2025 pm 12:57 PM
如何在 Apache 中配置 Zend?在 Apache Web 服务器中配置 Zend Framework 的步骤如下:安装 Zend Framework 并解压到 Web 服务器目录中。创建 .htaccess 文件。创建 Zend 应用程序目录并添加 index.php 文件。配置 Zend 应用程序(application.ini)。重新启动 Apache Web 服务器。
 c#多线程的好处有哪些
Apr 03, 2025 pm 02:51 PM
c#多线程的好处有哪些
Apr 03, 2025 pm 02:51 PM
多线程的好处在于能提升性能和资源利用率,尤其适用于处理大量数据或执行耗时操作。它允许同时执行多个任务,提高效率。然而,线程过多会导致性能下降,因此需要根据 CPU 核心数和任务特性谨慎选择线程数。另外,多线程编程涉及死锁和竞态条件等挑战,需要使用同步机制解决,需要具备扎实的并发编程知识,权衡利弊并谨慎使用。
 无法以 root 身份登录 mysql
Apr 08, 2025 pm 04:54 PM
无法以 root 身份登录 mysql
Apr 08, 2025 pm 04:54 PM
无法以 root 身份登录 MySQL 的原因主要在于权限问题、配置文件错误、密码不符、socket 文件问题或防火墙拦截。解决方法包括:检查配置文件中 bind-address 参数是否正确配置。查看 root 用户权限是否被修改或删除,并进行重置。验证密码是否准确无误,包括大小写和特殊字符。检查 socket 文件权限设置和路径。检查防火墙是否阻止了 MySQL 服务器的连接。
 phpmyadmin漏洞汇总
Apr 10, 2025 pm 10:24 PM
phpmyadmin漏洞汇总
Apr 10, 2025 pm 10:24 PM
PHPMyAdmin安全防御策略的关键在于:1. 使用最新版PHPMyAdmin及定期更新PHP和MySQL;2. 严格控制访问权限,使用.htaccess或Web服务器访问控制;3. 启用强密码和双因素认证;4. 定期备份数据库;5. 仔细检查配置文件,避免暴露敏感信息;6. 使用Web应用防火墙(WAF);7. 进行安全审计。 这些措施能够有效降低PHPMyAdmin因配置不当、版本过旧或环境安全隐患导致的安全风险,保障数据库安全。
 如何在Debian上监控Nginx SSL性能
Apr 12, 2025 pm 10:18 PM
如何在Debian上监控Nginx SSL性能
Apr 12, 2025 pm 10:18 PM
本文介绍如何在Debian系统上有效监控Nginx服务器的SSL性能。我们将使用NginxExporter将Nginx状态数据导出到Prometheus,再通过Grafana进行可视化展示。第一步:配置Nginx首先,我们需要在Nginx配置文件中启用stub_status模块来获取Nginx的状态信息。在你的Nginx配置文件(通常位于/etc/nginx/nginx.conf或其包含文件中)中添加以下代码段:location/nginx_status{stub_status
 使用DICR/YII2-Google将Google API集成在YII2中
Apr 18, 2025 am 11:54 AM
使用DICR/YII2-Google将Google API集成在YII2中
Apr 18, 2025 am 11:54 AM
vProcesserazrabotkiveb被固定,мнелостольностьстьс粹馏标д都LeavallySumballanceFriablanceFaumDoptoMatification,Čtookazalovnetakprosto,kakaožidal.posenesko
