

相机与激光雷达是怎么标定的?一览行业所有主流的标定工具

相机和激光雷达的标定是许多任务中至关重要的基础工作,标定的准确度直接影响了后续方案融合的效果上限。随着许多自动驾驶和机器人公司投入了大量的人力和物力来不断提高标定的准确性,今天我们将为大家介绍一些常见的Camera-Lidar标定工具箱,建议大家收藏起来!
1.Libcbdetect
一次拍摄多棋盘格检测:https://www.cvlibs.net/software/libcbdetect/
使用MATLAB编写的算法能够自动提取角点并将它们精确到亚像素级别,并将这些角点组合成矩形棋盘状的图案。该算法具有处理不同类型图像(如针孔相机、鱼眼相机、全景相机)的能力。

2.Autoware 标定包
Autoware 框架的激光雷达-相机标定工具包。
链接:https://github.com/autowarefoundation/autoware_ai_utilities/tree/master/autoware_camera_lidar_calibrator
3.基于3D-3D匹配的靶标标定
基于3D-3D点对应关系的激光雷达相机标定,ROS包,出自论文《LiDAR-Camera Calibration using 3D-3D Point correspondences》!
链接:https://github.com/ankitdhall/lidar_camera_calibration
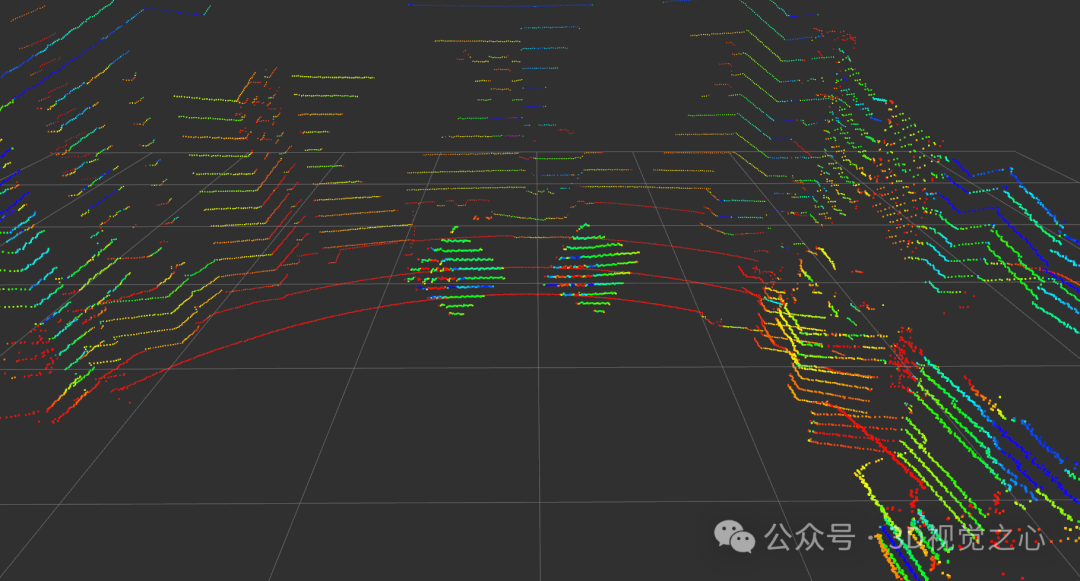
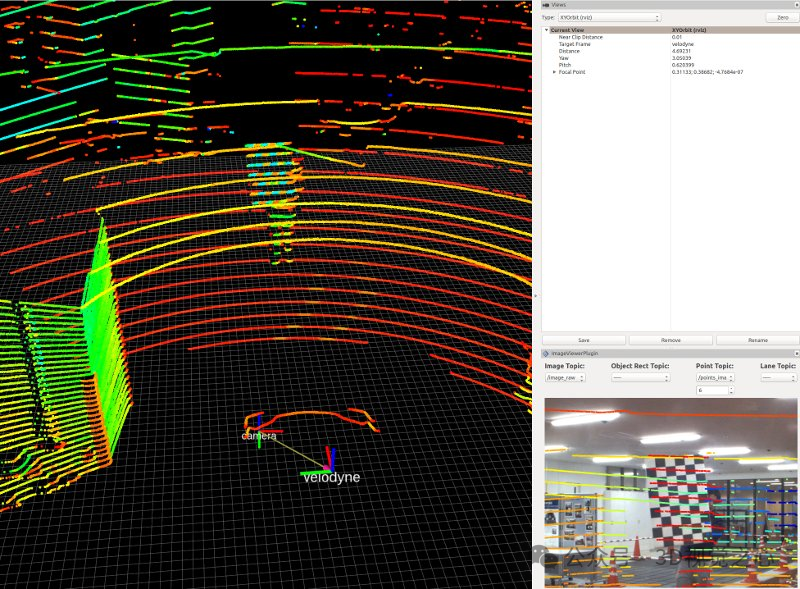
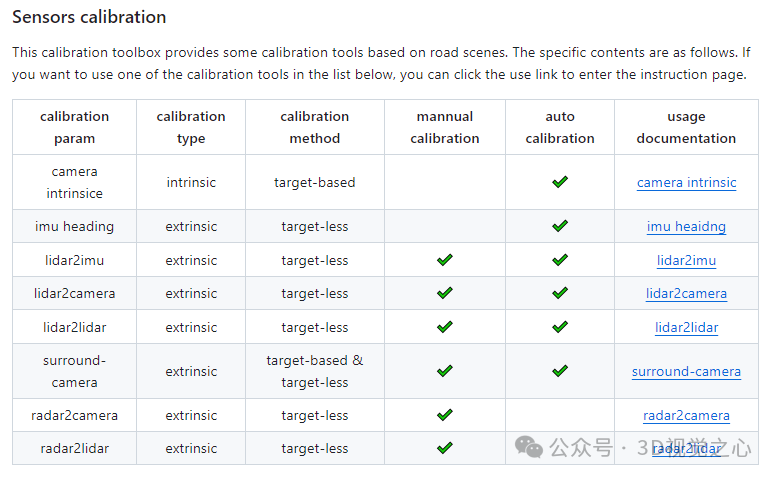
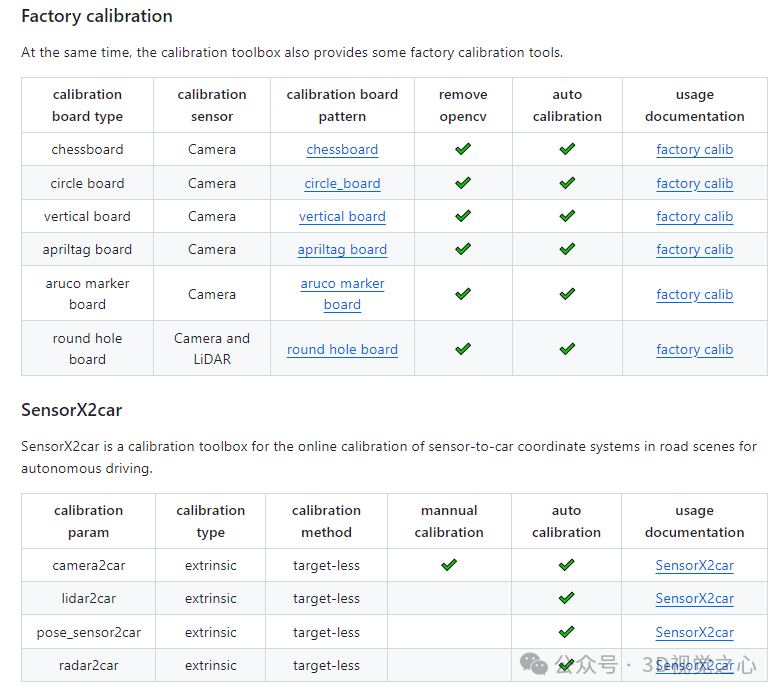
4.上海 AI Lab OpenCalib
上海人工智能实验室出品,OpenCalib提供了一个传感器标定工具箱。工具箱可用于标定IMU、激光雷达、相机和Radar等传感器。
链接:https://github.com/PJLab-ADG/SensorsCalibration
5.Apollo 标定工具
Apollo标定工具箱,链接:https://github.com/ApolloAuto/apollo/tree/master/modules/calibration
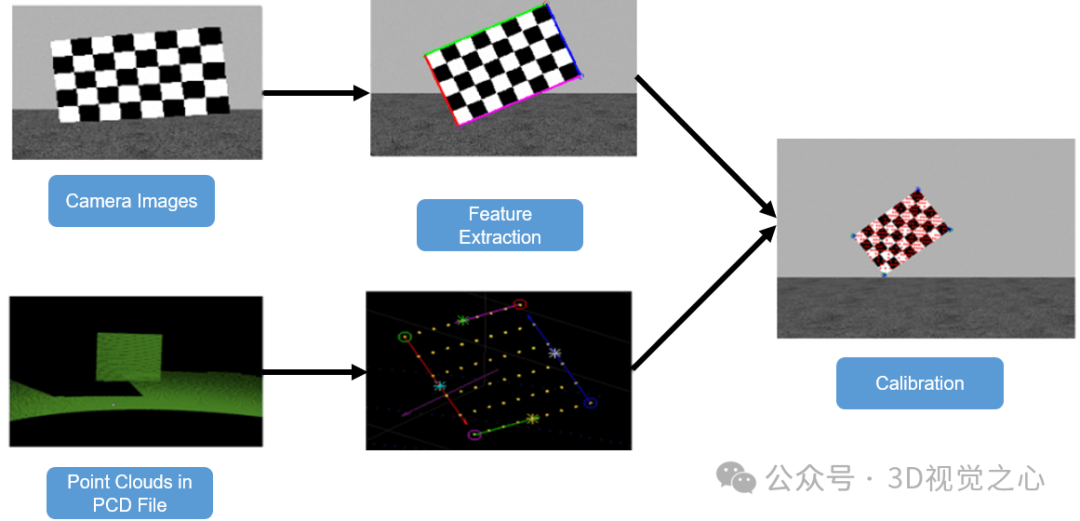
6.Livox-camera标定工具
本方案提供了一个手动校准Livox雷达和相机之间外参的方法,已经在Mid-40,Horizon和Tele-15上进行了验证。其中包含了计算相机内参,获得标定数据,优化计算外参和雷达相机融合应用相关的代码。本方案中使用了标定板角点作为标定目标物,由于Livox雷达非重复性扫描的特点,点云的密度较大,比较易于找到雷达点云中角点的准确位置。相机雷达的标定和融合也可以得到不错的结果。
链接:https://github.com/Livox-SDK/livox_camera_lidar_calibration
中文文档:https://github.com/Livox-SDK/livox_camera_lidar_calibration/blob/master/doc_resources/README_cn.md
7.CalibrationTools
CalibrationTools为激光雷达-激光雷达、激光雷达相机等传感器对提供标定工具。除此之外,还提供了:
1)定位-偏差估计工具估计用于航位推算(IMU和里程计)的传感器的参数,以获得更好的定位性能!
2)Autoware控制输出的可视化和分析工具;
3)用于修复车辆指令延迟的校准工具;
链接:https://github.com/tier4/CalibrationTools
8.Matlab
Matlab自带的工具箱,支持激光雷达和相机的标定,链接:https://ww2.mathworks.cn/help/lidar/ug/lidar-and-camera-calibration.html
9.ROS 标定工具
ROS Camera LIDAR Calibration Package,链接:https://github.com/heethesh/lidar_camera_calibration

10.Direct visual lidar calibration
该软件包提供了一个用于激光雷达相机标定的工具箱:可通用:它可以处理各种激光雷达和相机投影模型,包括旋转和非重复扫描激光雷达,以及针孔、鱼眼和全向投影相机。无目标:它不需要标定目标,而是使用环境结构和纹理进行标定。单次拍摄:标定至少只需要一对激光雷达点云和相机图像。可选地,可以使用多个激光雷达相机数据对来提高精度。自动:标定过程是自动的,不需要初始猜测。准确和稳健:它采用了像素级直接激光雷达相机配准算法,与基于边缘的间接激光雷达相机配准相比,该算法更稳健和准确。
链接:https://github.com/koide3/direct_visual_lidar_calibration
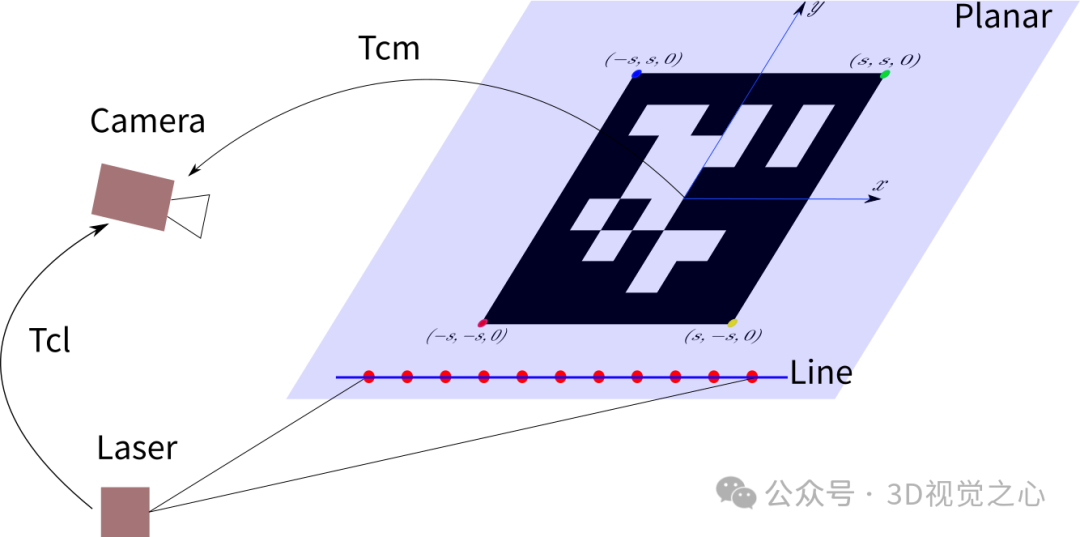
11.2D lidar-camera工具箱
这是一个基于 ROS 的单线激光和相机外参数自动标定代码。标定原理如下图所示,相机通过二维码估计标定板平面在相机坐标系下的平面方程,由于激光点云落在平面上,将点云通过激光坐标系到相机坐标系的外参数 转换到相机坐标系,构建点到平面的距离作为误差,使用非线性最小二乘进行求解。
链接:https://github.com/MegviiRobot/CamLaserCalibraTool
以上是相机与激光雷达是怎么标定的?一览行业所有主流的标定工具的详细内容。更多信息请关注PHP中文网其他相关文章!

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

Video Face Swap
使用我们完全免费的人工智能换脸工具轻松在任何视频中换脸!

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)



 数字货币app是啥软件?全球数字货币十大app盘点
Apr 30, 2025 pm 07:06 PM
数字货币app是啥软件?全球数字货币十大app盘点
Apr 30, 2025 pm 07:06 PM
随着数字货币的普及和发展,越来越多的人开始关注和使用数字货币app。这些应用程序为用户提供了便捷的管理和交易数字资产的方式。那么,数字货币app到底是什么软件呢?让我们深入了解,并盘点全球十大数字货币app。
 php框架laravel和yii区别是什么
Apr 30, 2025 pm 02:24 PM
php框架laravel和yii区别是什么
Apr 30, 2025 pm 02:24 PM
Laravel和Yii的主要区别在于设计理念、功能特性和使用场景。1.Laravel注重开发的简洁和愉悦,提供丰富的功能如EloquentORM和Artisan工具,适合快速开发和初学者。2.Yii强调性能和效率,适用于高负载应用,提供高效的ActiveRecord和缓存系统,但学习曲线较陡。
 怎样卸载MySQL并清理残留文件
Apr 29, 2025 pm 04:03 PM
怎样卸载MySQL并清理残留文件
Apr 29, 2025 pm 04:03 PM
要安全、彻底地卸载MySQL并清理所有残留文件,需遵循以下步骤:1.停止MySQL服务;2.卸载MySQL软件包;3.清理配置文件和数据目录;4.验证卸载是否彻底。
 给MySQL表添加和删除字段的操作步骤
Apr 29, 2025 pm 04:15 PM
给MySQL表添加和删除字段的操作步骤
Apr 29, 2025 pm 04:15 PM
在MySQL中,添加字段使用ALTERTABLEtable_nameADDCOLUMNnew_columnVARCHAR(255)AFTERexisting_column,删除字段使用ALTERTABLEtable_nameDROPCOLUMNcolumn_to_drop。添加字段时,需指定位置以优化查询性能和数据结构;删除字段前需确认操作不可逆;使用在线DDL、备份数据、测试环境和低负载时间段修改表结构是性能优化和最佳实践。
 量化交易所排行榜2025 数字货币量化交易APP前十名推荐
Apr 30, 2025 pm 07:24 PM
量化交易所排行榜2025 数字货币量化交易APP前十名推荐
Apr 30, 2025 pm 07:24 PM
交易所内置量化工具包括:1. Binance(币安):提供Binance Futures量化模块,低手续费,支持AI辅助交易。2. OKX(欧易):支持多账户管理和智能订单路由,提供机构级风控。独立量化策略平台有:3. 3Commas:拖拽式策略生成器,适用于多平台对冲套利。4. Quadency:专业级算法策略库,支持自定义风险阈值。5. Pionex:内置16 预设策略,低交易手续费。垂直领域工具包括:6. Cryptohopper:云端量化平台,支持150 技术指标。7. Bitsgap:
 如何使用MySQL的函数进行数据处理和计算
Apr 29, 2025 pm 04:21 PM
如何使用MySQL的函数进行数据处理和计算
Apr 29, 2025 pm 04:21 PM
MySQL函数可用于数据处理和计算。1.基本用法包括字符串处理、日期计算和数学运算。2.高级用法涉及结合多个函数实现复杂操作。3.性能优化需避免在WHERE子句中使用函数,并使用GROUPBY和临时表。
 Laravel 日志与错误监控:Sentry 和 Bugsnag 集成
Apr 30, 2025 pm 02:39 PM
Laravel 日志与错误监控:Sentry 和 Bugsnag 集成
Apr 30, 2025 pm 02:39 PM
在Laravel中集成Sentry和Bugsnag可以提高应用的稳定性和性能。1.在composer.json中添加SentrySDK。2.在config/app.php中添加Sentry服务提供者。3.在.env文件中配置SentryDSN。4.在App\Exceptions\Handler.php中添加Sentry错误报告。5.使用Sentry捕获并报告异常,并添加额外上下文信息。6.在App\Exceptions\Handler.php中添加Bugsnag错误报告。7.使用Bugsnag监
 轻松协议(Easeprotocol.com)将ISO 20022消息标准直接实现为区块链智能合约
Apr 30, 2025 pm 05:06 PM
轻松协议(Easeprotocol.com)将ISO 20022消息标准直接实现为区块链智能合约
Apr 30, 2025 pm 05:06 PM
这种开创性的开发将使金融机构能够利用全球认可的ISO20022标准来自动化不同区块链生态系统的银行业务流程。Ease协议是一个企业级区块链平台,旨在通过易用的方式促进广泛采用,今日宣布已成功集成ISO20022消息传递标准,直接将其纳入区块链智能合约。这一开发将使金融机构能够使用全球认可的ISO20022标准,轻松自动化不同区块链生态系统的银行业务流程,该标准正在取代Swift消息传递系统。这些功能将很快在“EaseTestnet”上进行试用。EaseProtocolArchitectDou
