

Meta和纽约大学开发的OK-Robot:茶倒水机器人已经出现

在一个家庭环境中,家庭成员常常被要求去拿电视柜上的遥控器。有时甚至连宠物狗也无法幸免。但总有时候,人们会遇到无法支使他人的情况。而宠物狗也未必能理解指令。人类对机器人的期望,就是能够帮助完成这些琐事,这是我们对机器人的最终梦想。
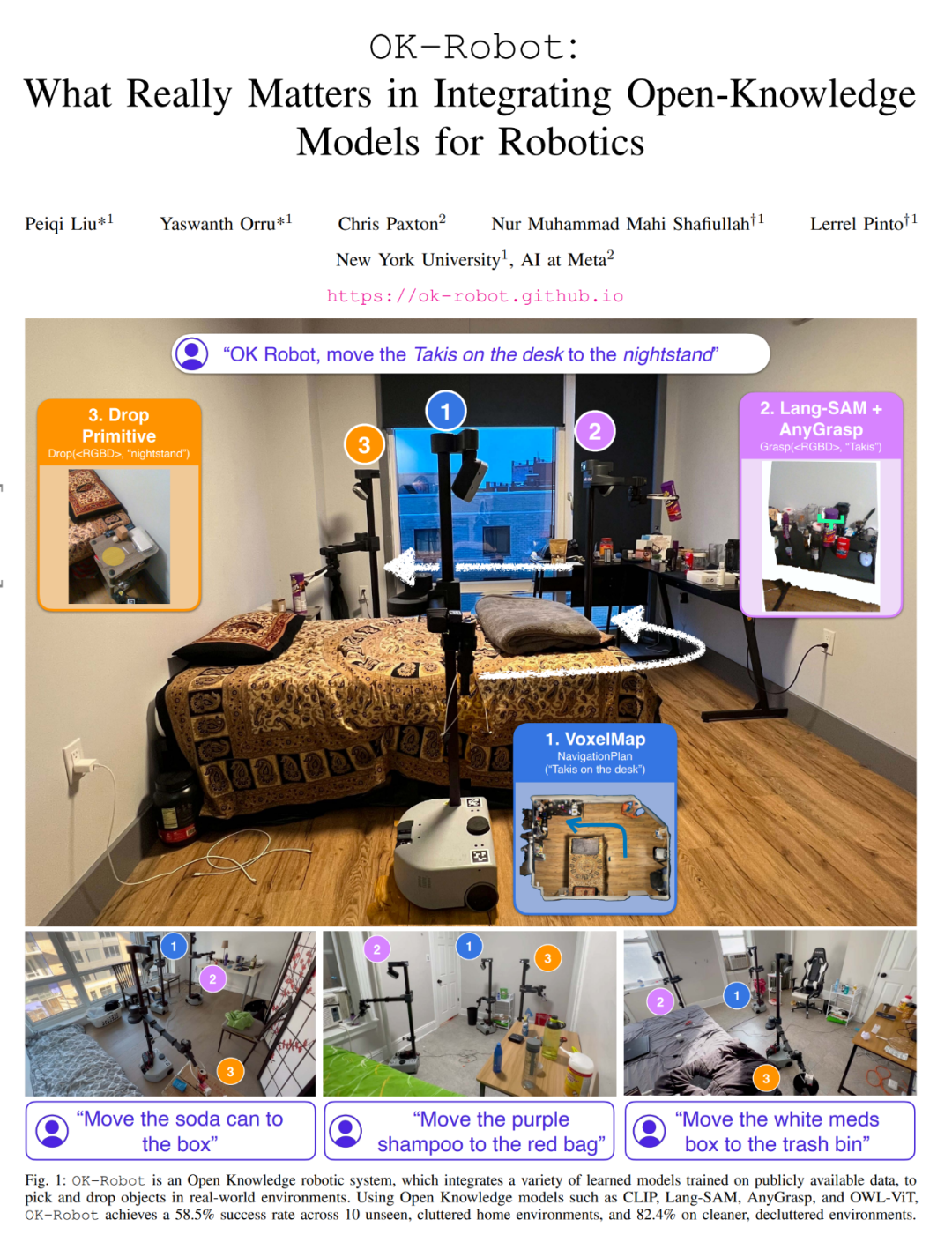
最近,纽约大学和Meta合作研发了一款具备自主行动能力的机器人。当你告诉它:“请把桌子上的玉米片放到床头柜上”,它就会通过自主寻找玉米片,并规划最佳路线和相应动作,成功地完成任务。此外,该机器人还具备整理物品和处理垃圾的能力,为你提供便利。



这个机器人名为OK-Robot,是由来自纽约大学和Meta的研究者共同构建的。他们将视觉语言模型、导航和抓取的基础模块整合到一个开放知识型框架中,为机器人的高效拾放操作提供了解决方案。这意味着当我们年纪大了以后,购买一个机器人来帮助我们端茶倒水可能会成为现实。
OK-Robot的「开放知识」定位是指它通过在大型公开数据集上进行训练的学习模型。当OK-Robot被放置在一个新的家庭环境中时,它会从iPhone上获取扫描结果。根据这些扫描结果,它会使用LangSam和CLIP计算出密集的视觉语言表征,并将其存储在语义存储器中。然后,当给定一个需要拾取的物体的语言查询时,查询的语言表征会与语义记忆进行匹配。接下来,OK-Robot会逐步应用导航和拾取模块,移动到所需的物体并将其拾取起来。类似的过程也可用于丢弃物体。
为了研究OK-Robot,研究者在10个真实的家庭环境中对其进行了测试。通过实验,他们发现在一个未见过的自然家居环境中,该系统的零样本部署成功率平均为58.5%。然而,这一成功率在很大程度上取决于环境的"自然程度"。他们还发现,通过改进查询方式、整理空间以及排除明显具有对抗性的物体(如太大、太半透明、太滑),这一成功率可以提高至约82.4%。
在纽约市的 10 个家庭环境中,OK-Robot 尝试了 171 个拾取任务。
总之,通过实验,他们得出了以下结论:
- 预训练的视觉语言模型对开放词汇导航非常有效:目前的开放词汇视觉语言模型 —— 如 CLIP 或 OWL-ViT—— 在识别真实世界中的任意物体方面表现出色,并能以零样本的方式导航、找到这些物体。
- 预训练的抓取模型可直接应用于移动操控:与 VLM 类似,根据大量数据预训练的专用机器人模型可以直接应用于家庭中的开放词汇抓取。这些机器人模型不需要任何额外的训练或微调。
- 如何组合组件至关重要: 研究者发现,在预先训练好模型的情况下,可以使用一个简单的状态机模型(state-machine model)将它们组合起来,而无需进行任何训练。他们还发现,使用启发式方法来抵消机器人的物理限制,可以在真实世界中获得更高的成功率。
- 目前仍存在一些挑战:考虑到在任意家庭中进行零样本操作的巨大挑战,OK-Robot 在先前工作的基础上进行了改进:通过分析失败模式,他们发现在视觉语言模型、机器人模型和机器人形态学方面可以进行重大改进,这将直接提高开放知识操纵智能体的性能。
为了鼓励和支持其他研究者在开放知识机器人领域的工作,作者表示将共享 OK-Robot 的代码和模块。更多信息可参见:https://ok-robot.github.io。
- 论文标题:OK-Robot: What Really Matters in Integrating Open-Knowledge Models for Robotics
- 论文链接:https://arxiv.org/pdf/2401.12202.pdf
技术组成和方法
该研究主要解决这个问题:从 B 上拿起 A 并将其放在 C 上,其中 A 是一个物体,B 和 C 是现实世界环境中的某个地方。要实现这一点,所提系统需要包含以下模块:开放词汇对象导航模块,开放词汇 RGB-D 抓取模块以及释放或放置对象的启发式模块(dropping heuristic)。
开放词汇对象导航
首先是扫描房间。开放词汇对象导航遵循了 CLIP-Fields 的方法,并假设有一个预先映射阶段,即使用 iPhone 手动扫描家庭环境。这种手动扫描只是用 iPhone 上的 Record3D 应用程序拍摄家庭视频,这将产生一系列带位置的 RGB-D 图像。
扫描每个房间的时间不到一分钟,一旦信息收集完毕,RGB-D 图像以及相机的姿态和位置就被导出到项目库中进行地图构建。录制时必须捕捉地面表面以及环境中的物体和容器。
接下来是进行对象检测。在扫描的每一帧上,会有一个开放词汇对象检测器对扫描的内容进行处理。本文选择 OWL-ViT 对象检测器,因为这种方法在初步查询中表现更好。研究者在每一帧上应用检测器,并提取每个对象边界框、CLIP 嵌入、检测器置信度,并将它们传递到导航模块的对象存储模块中。
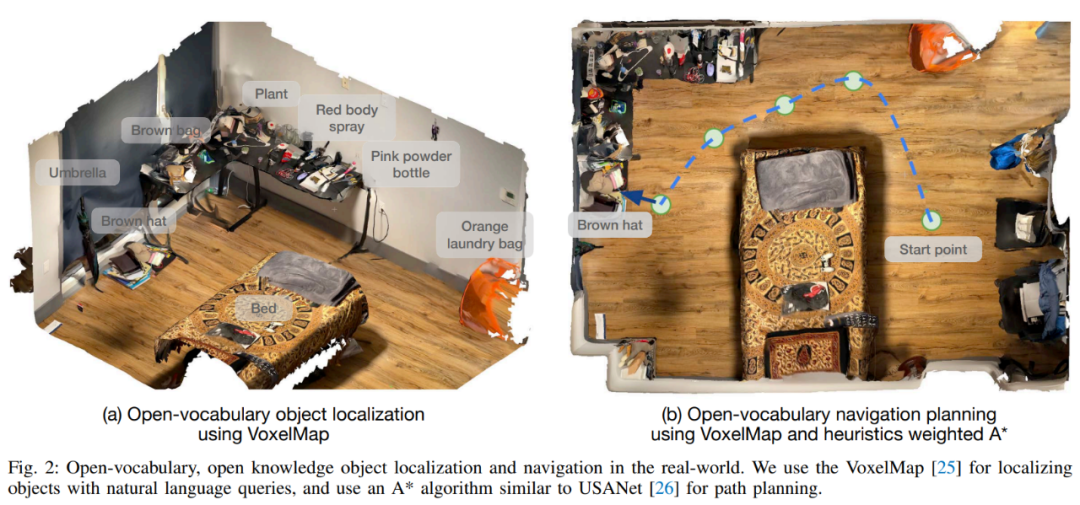
然后进行以对象为中心的语义存储。本文借助 VoxelMap 来完成这一步,具体来说,他们使用深度图像和相机收集的姿态将对象掩模反向投影到现实世界坐标中,这种方式可以提供一个点云,其中每个点都有一个来自 CLIP 的关联语义向量。
之后是查询记忆模块:给定一个语言查询,本文使用 CLIP 语言编码器将其转换为语义向量。由于每个体素都与家中的真实位置相关联,因此可以找到最有可能找到查询对象的位置,类似于图 2 (a)。
必要时,本文将「A on B」实施为「A close B」。为此,查询 A 选择前 10 个点,查询 B 选择前 50 个点。然后计算 10×50 成对欧氏距离,并选择与最短 (A, B) 距离相关的 A 点。
完成上述过程,接下来就是导航到现实世界中的对象:一旦得到了现实世界中的 3D 位置坐标,就可以将其用作机器人的导航目标来初始化操作阶段。导航模块必须将机器人放置在手臂可触到的范围,以便机器人随后可以操纵目标物体。
机器人对现实世界物体的抓握
与开放词汇导航不同,为了完成抓取任务,算法需要与现实世界中的任意对象进行物理交互,这使得这部分变得更加困难。因此,本文选择使用预训练的抓取模型来生成现实世界中的抓取姿态,并使用 VLM 进行语言条件过滤。
本文使用的抓取生成模块是 AnyGrasp,它在给定单个 RGB 图像和点云的场景中使用平行钳口夹具生成无碰撞抓取。
AnyGrasp 提供了场景中可能的抓握(图 3 第 2 列),包括抓握点、宽度、高度、深度和抓握分数,该分数表示每次抓握中未校准的模型置信度。
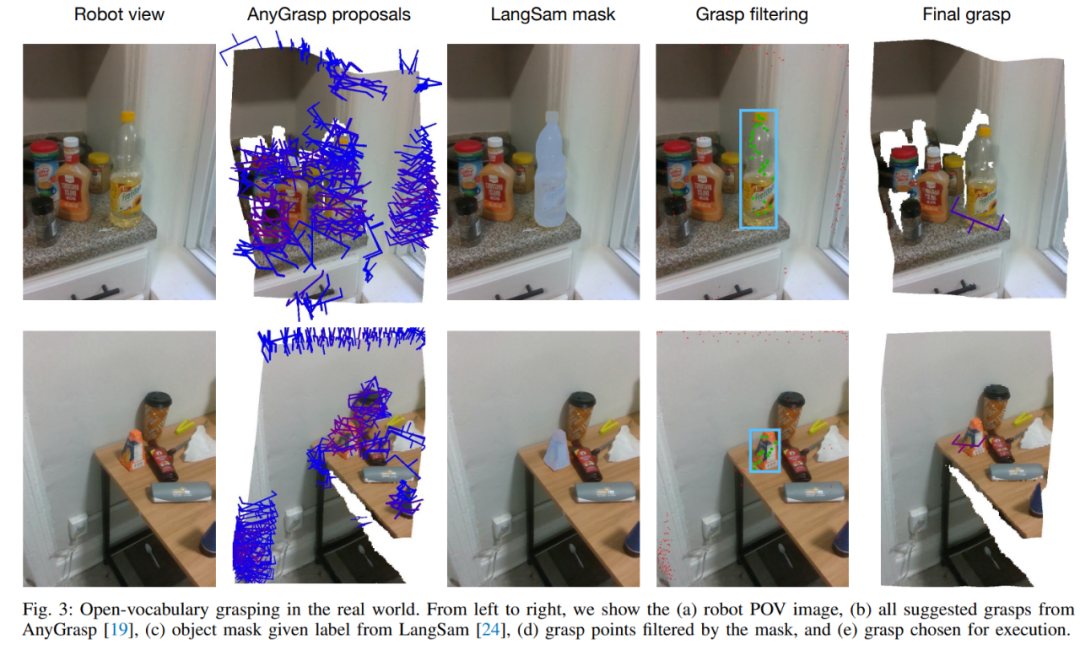
使用语言查询过滤抓握:对于从 AnyGrasp 获得的抓握建议,本文采用 LangSam 过滤抓握。本文将所有建议的抓握点投影到图像上,并找到落入对象掩模的抓握点(图 3 第 4 列)。
抓握执行。一旦确定了最佳抓握(图 3 第 5 列),就可以使用简单的预抓握方法来抓握目标对象。
释放或放置对象的启发式模块
抓握对象后,接下来就是将对象放置在什么地方。与 HomeRobot 的基线实现不同,该方法假设物体放下的位置是一个平坦的表面,本文进行了扩展,还涵盖了凹物体,如水槽、箱子、盒子和袋子。
至此,导航、抓握和放置都有了,之后就可以直接将它们组合起来,该方法可以直接应用于任何新的家庭。对于新的家居环境,该研究可以在一分钟内扫描房间。然后,只需不到五分钟即可将其处理到 VoxelMap 中。一旦完成,机器人就可以立即放置在选定的场地并开始运行。从到达一个全新的环境到开始在其中自主操作,该系统平均需要不到 10 分钟即可完成第一个取放任务。
实验
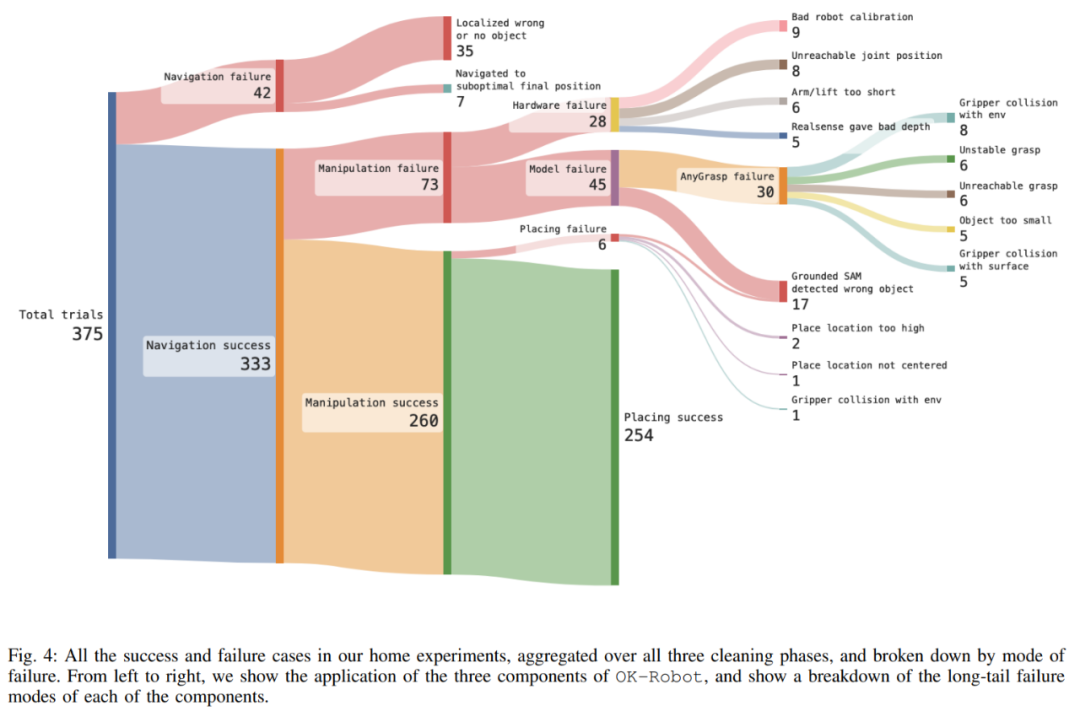
在超过 10 个家庭实验中,OK-Robot 在取放任务上实现了 58.5% 的成功率。
该研究还对 OK-Robot 进行了深入探索以更好地理解其故障模式。研究发现,故障的主要原因是操作故障,然而,仔细观察后注意到失败的原因是长尾造成的,如图 4 所示,失败的三大原因包括未能从语义记忆中检索到要导航到的正确对象 (9.3%) ,从操作模块获得的姿态难以完成(8.0%),以及硬件原因(7.5%)。
由图 5 可得,OK-Robot 中使用的 VoxelMap 略微优于其他语义记忆模块。至于抓取模块,AnyGrasp 明显优于其他抓取方法,在相对规模上比最佳候选方法(自上而下抓取)的性能高出近 50%。然而,基于启发式的算法,HomeRobot 的自上向下抓取击败了开源 AnyGrasp 基线和 Contact-GraspNet,这一事实表明构建真正的通用抓取模型仍然很困难。
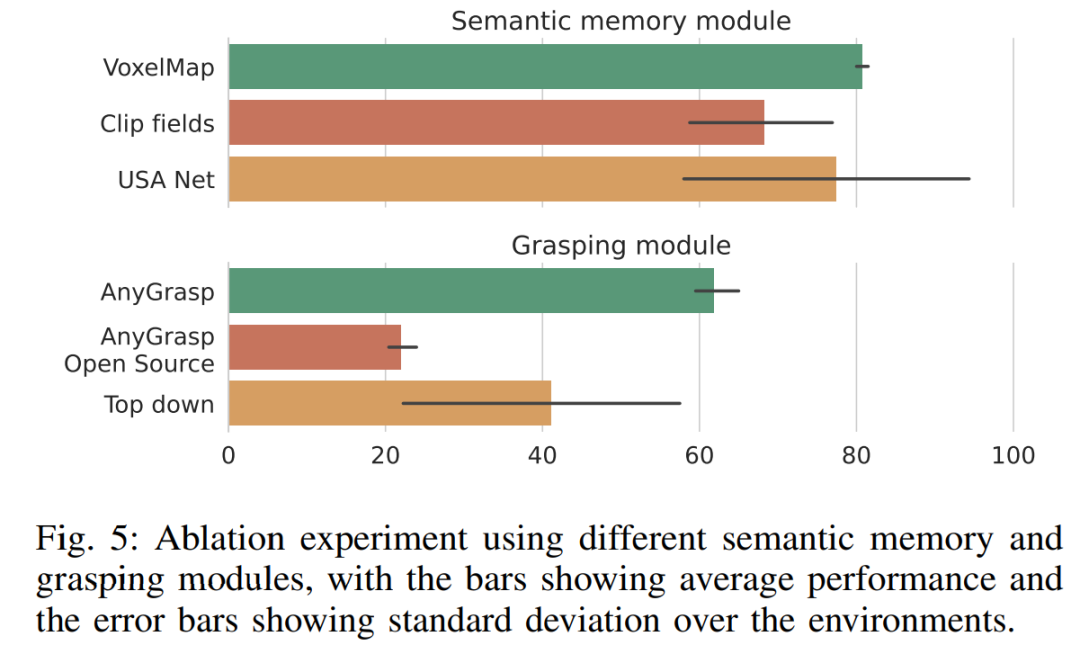
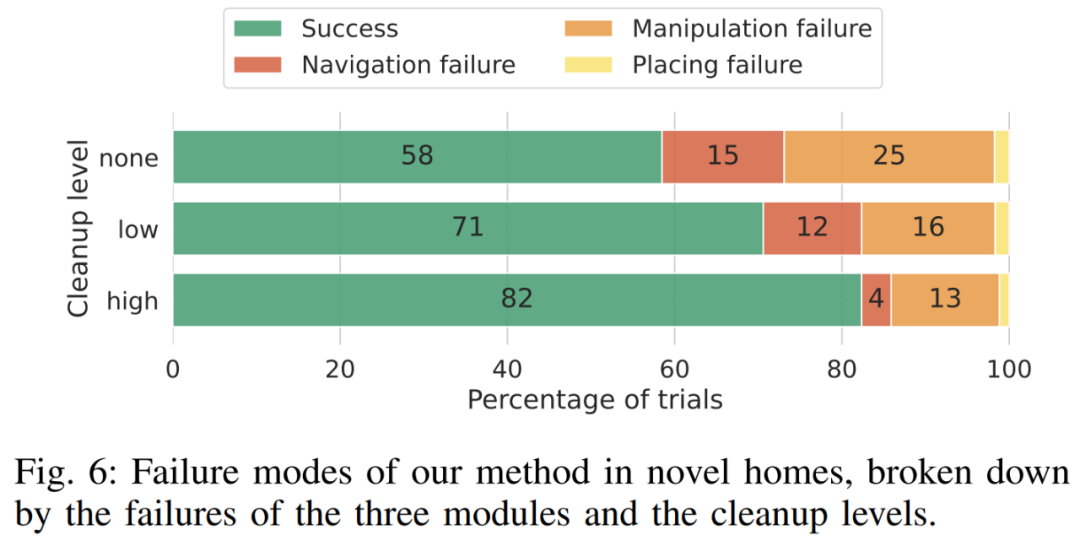
图 6 展示了 OK-Robot 在各个阶段失败的完整分析。由分析可得,当研究者对环境进行清理并删除模糊物体时,导航准确率会上升,总错误率从 15% 下降到 12%,最后一直下降到 4%。同样,当研究者清理环境中的杂物时,操作准确率也提高了,错误率从 25% 下降到 16%,最后下降到 13%。
了解更多内容,请参考原论文。
以上是Meta和纽约大学开发的OK-Robot:茶倒水机器人已经出现的详细内容。更多信息请关注PHP中文网其他相关文章!

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

Video Face Swap
使用我们完全免费的人工智能换脸工具轻松在任何视频中换脸!

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)



 如何设置、获取和删除 WordPress Cookie(像专业人士一样)
May 12, 2025 pm 08:57 PM
如何设置、获取和删除 WordPress Cookie(像专业人士一样)
May 12, 2025 pm 08:57 PM
您想了解如何在WordPress网站上使用cookie吗?Cookie是在用户浏览器中存储临时信息的有用工具。您可以使用此信息通过个性化和行为定位来增强用户体验。在本终极指南中,我们将向您展示如何像专业人士一样设置、获取和删除WordPresscookie。注意:这是一个高级教程。它要求您精通HTML、CSS、WordPress网站和PHP。什么是Cookie?Cookie是用户访问网站时创建并存储在用户浏览
 2025年火币APKV10.50.0下载地址
May 12, 2025 pm 08:42 PM
2025年火币APKV10.50.0下载地址
May 12, 2025 pm 08:42 PM
火币APKV10.50.0下载指南:1、点击文中直达链接;2、选择正确的下载包;3、填写注册信息;4、开始火币交易流程。
 2025年火币APKV10.50.0下载指南 怎么下载
May 12, 2025 pm 08:48 PM
2025年火币APKV10.50.0下载指南 怎么下载
May 12, 2025 pm 08:48 PM
火币APKV10.50.0下载指南:1、点击文中直达链接;2、选择正确的下载包;3、填写注册信息;4、开始火币交易流程。
 2025年火币APKV10.50.0安装方法 APK指南
May 12, 2025 pm 08:27 PM
2025年火币APKV10.50.0安装方法 APK指南
May 12, 2025 pm 08:27 PM
火币APKV10.50.0下载指南:1、点击文中直达链接;2、选择正确的下载包;3、填写注册信息;4、开始火币交易流程。
 2025年火币APKV10.50.0下载网址
May 12, 2025 pm 08:39 PM
2025年火币APKV10.50.0下载网址
May 12, 2025 pm 08:39 PM
火币APKV10.50.0下载指南:1、点击文中直达链接;2、选择正确的下载包;3、填写注册信息;4、开始火币交易流程。
 十大数字币交易所app最新排名 数字货币十大交易所app推荐
May 12, 2025 pm 08:15 PM
十大数字币交易所app最新排名 数字货币十大交易所app推荐
May 12, 2025 pm 08:15 PM
十大数字币交易所app最新排名依次为:1. OKX,2. Binance,3. Huobi,4. Coinbase,5. Kraken,6. KuCoin,7. Bitfinex,8. Gemini,9. Bitstamp,10. Poloniex。使用这些app的步骤包括:下载并安装app,注册账户,完成KYC认证,充值并开始交易。
 2025十大虚拟币交易所app排名 数字货币交易APP最新排行榜前十名
May 12, 2025 pm 08:18 PM
2025十大虚拟币交易所app排名 数字货币交易APP最新排行榜前十名
May 12, 2025 pm 08:18 PM
2025年十大虚拟币交易所APP排名如下:1. OKX,2. Binance,3. Huobi,4. Coinbase,5. Kraken,6. KuCoin,7. Bybit,8. FTX,9. Bitfinex,10. Gate.io。这些交易所根据用户体验、安全性和交易量等维度进行评选,每个平台都提供了独特的功能和服务,以满足不同用户的需求。
 火币APKV10.50.0版本安装教程
May 12, 2025 pm 08:33 PM
火币APKV10.50.0版本安装教程
May 12, 2025 pm 08:33 PM
火币APKV10.50.0下载指南:1、点击文中直达链接;2、选择正确的下载包;3、填写注册信息;4、开始火币交易流程。
