

Javascript图像处理—平滑处理实现原理_javascript技巧

前言
上一篇文章,我们讲解了图像的虚拟边缘,这篇文章开始进行平滑(也就是模糊)处理。
基本原理
这里直接引用OpenCV 2.4+ C++ 平滑处理和OpenCV 2.4+ C++ 边缘梯度计算的相关内容:
平滑也称模糊, 是一项简单且使用频率很高的图像处理方法。
平滑处理时需要用到一个滤波器
。 最常用的滤波器是线性 滤波器,线性滤波处理的输出像素值(例如:)是输入像素值(例如:
, 它仅仅是一个加权系数。
 )是输入像素值(例如:
)是输入像素值(例如: )的加权平均:
)的加权平均:

 称为核
称为核这里涉及一种叫做“卷积”的运算,那么卷积是什么呢?
卷积是在每一个图像块与某个算子(核)之间进行的运算。
核?!
nbsp;dsds
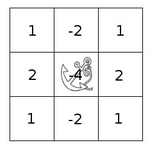
核就是一个固定大小的数值数组。该数组带有一个锚点
,一般位于数组中央。
可是这怎么运算啊?
假如你想得到图像的某个特定位置的卷积值,可用下列方法计算:
将核的锚点放在该特定位置的像素上,同时,核内的其他值与该像素邻域的各像素重合;将核内各值与相应像素值相乘,并将乘积相加;将所得结果放到与锚点对应的像素上;对图像所有像素重复上述过程。
用公式表示上述过程如下:

在图像边缘的卷积怎么办呢?
计算卷积前,需要通过复制源图像的边界创建虚拟像素,这样边缘的地方也有足够像素计算卷积了。这就是为什么上一篇文章需要做虚拟边缘函数。
均值平滑
均值平滑实际上就是内核元素全是1的卷积运算,然后再除以内核的大小,用数学表达式来表示就是:

下面我们来实现均值平滑函数blur:
function blur(__src, __size1, __size2, __borderType, __dst){
if(__src.type && __src.type == "CV_RGBA"){
var height = __src.row,
width = __src.col,
dst = __dst || new Mat(height, width, CV_RGBA),
dstData = dst.data;
var size1 = __size1 || 3,
size2 = __size2 || size1,
size = size1 * size2;
if(size1 % 2 !== 1 || size2 % 2 !== 1){
console.error("size大小必须是奇数");
return __src;
}
var startX = Math.floor(size1 / 2),
startY = Math.floor(size2 / 2);
var withBorderMat = copyMakeBorder(__src, startY, startX, 0, 0, __borderType),
mData = withBorderMat.data,
mWidth = withBorderMat.col;
var newValue, nowX, offsetY, offsetI;
var i, j, c, y, x;
for(i = height; i--;){
offsetI = i * width;
for(j = width; j--;){
for(c = 3; c--;){
newValue = 0;
for(y = size2; y--;){
offsetY = (y + i) * mWidth * 4;
for(x = size1; x--;){
nowX = (x + j) * 4 + c;
newValue += mData[offsetY + nowX];
}
}
dstData[(j + offsetI) * 4 + c] = newValue / size;
}
dstData[(j + offsetI) * 4 + 3] = mData[offsetY + startY * mWidth * 4 + (j + startX) * 4 + 3];
}
}
}else{
console.error("不支持类型。");
}
return dst;
}
其中size1和size2分别是核的横向和纵向大小,并且必须是正奇数。
高斯平滑
最有用的滤波器 (尽管不是最快的)。 高斯滤波是将输入数组的每一个像素点与高斯内核
卷积将卷积和当作输出像素值。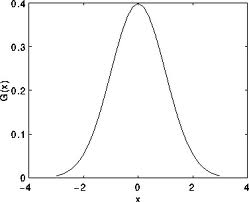
参考一维高斯函数,我们可以看见,他是个中间大两边小的函数。
所以高斯滤波器其加权数是中间大,四周小的。
其二维高斯函数为:

其中
 为均值 (峰值对应位置),
为均值 (峰值对应位置),
 代表标准差 (变量
代表标准差 (变量
 和 变量
和 变量
 各有一个均值,也各有一个标准差)。
各有一个均值,也各有一个标准差)。
这里参考OpenCV的实现,不过应该还有优化空间,因为还没用到分离滤波器。
首先我们做一个getGaussianKernel来返回高斯滤波器的一维数组。
function getGaussianKernel(__n, __sigma){
var SMALL_GAUSSIAN_SIZE = 7,
smallGaussianTab = [[1],
[0.25, 0.5, 0.25],
[0.0625, 0.25, 0.375, 0.25, 0.0625],
[0.03125, 0.109375, 0.21875, 0.28125, 0.21875, 0.109375, 0.03125]
];
var fixedKernel = __n & 2 == 1 && __n > 1] : 0;
var sigmaX = __sigma > 0 ? __sigma : ((__n - 1) * 0.5 - 1) * 0.3 + 0.8,
scale2X = -0.5 / (sigmaX * sigmaX),
sum = 0;
var i, x, t, kernel = [];
for(i = 0; i x = i - (__n - 1) * 0.5;
t = fixedKernel ? fixedKernel[i] : Math.exp(scale2X * x * x);
kernel[i] = t;
sum += t;
}
sum = 1 / sum;
for(i = __n; i--;){
kernel[i] *= sum;
}
return kernel;
};
然后通过两个这个一维数组,便可以计算出一个完整的高斯内核,再利用blur里面用到的循环方法,就可以算出高斯平滑后的矩阵了。
function GaussianBlur(__src, __size1, __size2, __sigma1, __sigma2, __borderType, __dst){
if(__src.type && __src.type == "CV_RGBA"){
var height = __src.row,
width = __src.col,
dst = __dst || new Mat(height, width, CV_RGBA),
dstData = dst.data;
var sigma1 = __sigma1 || 0,
sigma2 = __sigma2 || __sigma1;
var size1 = __size1 || Math.round(sigma1 * 6 + 1) | 1,
size2 = __size2 || Math.round(sigma2 * 6 + 1) | 1,
size = size1 * size2;
if(size1 % 2 !== 1 || size2 % 2 !== 1){
console.error("size必须是奇数。");
return __src;
}
var startX = Math.floor(size1 / 2),
startY = Math.floor(size2 / 2);
var withBorderMat = copyMakeBorder(__src, startY, startX, 0, 0, __borderType),
mData = withBorderMat.data,
mWidth = withBorderMat.col;
var kernel1 = getGaussianKernel(size1, sigma1),
kernel2,
kernel = new Array(size1 * size2);
if(size1 === size2 && sigma1 === sigma2)
kernel2 = kernel1;
else
kernel2 = getGaussianKernel(size2, sigma2);
var i, j, c, y, x;
for(i = kernel2.length; i--;){
for(j = kernel1.length; j--;){
kernel[i * size1 + j] = kernel2[i] * kernel1[j];
}
}
var newValue, nowX, offsetY, offsetI;
for(i = height; i--;){
offsetI = i * width;
for(j = width; j--;){
for(c = 3; c--;){
newValue = 0;
for(y = size2; y--;){
offsetY = (y + i) * mWidth * 4;
for(x = size1; x--;){
nowX = (x + j) * 4 + c;
newValue += (mData[offsetY + nowX] * kernel[y * size1 + x]);
}
}
dstData[(j + offsetI) * 4 + c] = newValue;
}
dstData[(j + offsetI) * 4 + 3] = mData[offsetY + startY * mWidth * 4 + (j + startX) * 4 + 3];
}
}
}else{
console.error("不支持的类型");
}
return dst;
}
中值平滑
中值滤波将图像的每个像素用邻域 (以当前像素为中心的正方形区域)像素的
中值代替 。依然使用blur里面用到的循环,只要得到核中的所有值,再通过sort排序便可以得到中值,然后锚点由该值替代。
function medianBlur(__src, __size1, __size2, __borderType, __dst){
if(__src.type && __src.type == "CV_RGBA"){
var height = __src.row,
width = __src.col,
dst = __dst || new Mat(height, width, CV_RGBA),
dstData = dst.data;
var size1 = __size1 || 3,
size2 = __size2 || size1,
size = size1 * size2;
if(size1 % 2 !== 1 || size2 % 2 !== 1){
console.error("size必须是奇数");
return __src;
}
var startX = Math.floor(size1 / 2),
startY = Math.floor(size2 / 2);
var withBorderMat = copyMakeBorder(__src, startY, startX, 0, 0, __borderType),
mData = withBorderMat.data,
mWidth = withBorderMat.col;
var newValue = [], nowX, offsetY, offsetI;
var i, j, c, y, x;
for(i = height; i--;){
offsetI = i * width;
for(j = width; j--;){
for(c = 3; c--;){
for(y = size2; y--;){
offsetY = (y + i) * mWidth * 4;
for(x = size1; x--;){
nowX = (x + j) * 4 + c;
newValue[y * size1 + x] = mData[offsetY + nowX];
}
}
newValue.sort();
dstData[(j + offsetI) * 4 + c] = newValue[Math.round(size / 2)];
}
dstData[(j + offsetI) * 4 + 3] = mData[offsetY + startY * mWidth * 4 + (j + startX) * 4 + 3];
}
}
}else{
console.error("类型不支持");
}
return dst;
};

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

Video Face Swap
使用我们完全免费的人工智能换脸工具轻松在任何视频中换脸!

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)



 Wasserstein距离在图像处理任务中的应用方法是什么?
Jan 23, 2024 am 10:39 AM
Wasserstein距离在图像处理任务中的应用方法是什么?
Jan 23, 2024 am 10:39 AM
Wasserstein距离,又称为EarthMover'sDistance(EMD),是一种用于度量两个概率分布之间差异的度量方法。相比于传统的KL散度或JS散度,Wasserstein距离考虑了分布之间的结构信息,因此在许多图像处理任务中展现出更好的性能。通过计算两个分布之间的最小运输成本,Wasserstein距离能够测量将一个分布转换为另一个分布所需的最小工作量。这种度量方法能够捕捉到分布之间的几何差异,从而在图像生成、风格迁移等任务中发挥重要作用。因此,Wasserstein距离成为了概
 深入解析Vision Transformer(VIT)模型的工作原理和特点
Jan 23, 2024 am 08:30 AM
深入解析Vision Transformer(VIT)模型的工作原理和特点
Jan 23, 2024 am 08:30 AM
VisionTransformer(VIT)是Google提出的一种基于Transformer的图片分类模型。不同于传统CNN模型,VIT将图像表示为序列,并通过预测图像的类标签来学习图像结构。为了实现这一点,VIT将输入图像划分为多个补丁,并将每个补丁中的像素通过通道连接,然后进行线性投影以达到所需的输入维度。最后,每个补丁被展平为单个向量,从而形成输入序列。通过Transformer的自注意力机制,VIT能够捕捉到不同补丁之间的关系,并进行有效的特征提取和分类预测。这种序列化的图像表示方法为
 C#开发中如何处理图像处理和图形界面设计问题
Oct 08, 2023 pm 07:06 PM
C#开发中如何处理图像处理和图形界面设计问题
Oct 08, 2023 pm 07:06 PM
C#开发中如何处理图像处理和图形界面设计问题,需要具体代码示例引言:在现代软件开发中,图像处理和图形界面设计是常见的需求。而C#作为一种通用的高级编程语言,具有强大的图像处理和图形界面设计能力。本文将以C#为基础,讨论如何处理图像处理和图形界面设计问题,并给出详细的代码示例。一、图像处理问题:图像读取和显示:在C#中,图像的读取和显示是基本操作。可以使用.N
 AI技术在图像超分辨率重建方面的应用
Jan 23, 2024 am 08:06 AM
AI技术在图像超分辨率重建方面的应用
Jan 23, 2024 am 08:06 AM
超分辨率图像重建是利用深度学习技术,如卷积神经网络(CNN)和生成对抗网络(GAN),从低分辨率图像中生成高分辨率图像的过程。该方法的目标是通过将低分辨率图像转换为高分辨率图像,从而提高图像的质量和细节。这种技术在许多领域都有广泛的应用,如医学影像、监控摄像、卫星图像等。通过超分辨率图像重建,我们可以获得更清晰、更具细节的图像,有助于更准确地分析和识别图像中的目标和特征。重建方法超分辨率图像重建的方法通常可以分为两类:基于插值的方法和基于深度学习的方法。1)基于插值的方法基于插值的超分辨率图像重
 Java开发:如何实现图像识别和处理
Sep 21, 2023 am 08:39 AM
Java开发:如何实现图像识别和处理
Sep 21, 2023 am 08:39 AM
Java开发:图像识别与处理实践指南摘要:随着计算机视觉和人工智能的快速发展,图像识别和处理在各个领域都起到了重要作用。本文将介绍如何利用Java语言实现图像识别和处理,并提供具体的代码示例。一、图像识别的基本原理图像识别是指利用计算机技术对图像进行分析和理解,从而识别出图像中的对象、特征或内容。在进行图像识别之前,我们需要先了解一些基本的图像处理技术,如图
 使用AI技术修复老照片的实现方法(附示例和代码解析)
Jan 24, 2024 pm 09:57 PM
使用AI技术修复老照片的实现方法(附示例和代码解析)
Jan 24, 2024 pm 09:57 PM
老照片修复是利用人工智能技术对老照片进行修复、增强和改善的方法。通过计算机视觉和机器学习算法,该技术能够自动识别并修复老照片中的损坏和缺陷,使其看起来更加清晰、自然和真实。老照片修复的技术原理主要包括以下几个方面:1.图像去噪和增强修复老照片时,需要先对其进行去噪和增强处理。可以使用图像处理算法和滤波器,如均值滤波、高斯滤波、双边滤波等,来解决噪点和色斑问题,从而提升照片的质量。2.图像复原和修复在老照片中,可能存在一些缺陷和损坏,例如划痕、裂缝、褪色等。这些问题可以通过图像复原和修复算法来解决
 PHP学习笔记:人脸识别与图像处理
Oct 08, 2023 am 11:33 AM
PHP学习笔记:人脸识别与图像处理
Oct 08, 2023 am 11:33 AM
PHP学习笔记:人脸识别与图像处理前言:随着人工智能技术的发展,人脸识别和图像处理成为了热门话题。在实际应用中,人脸识别与图像处理多用于安全监控、人脸解锁、卡牌比对等方面。而PHP作为一种常用的服务器端脚本语言,也可以用来实现人脸识别与图像处理的相关功能。本篇文章将带你了解PHP中的人脸识别与图像处理,并附有具体的代码示例。一、PHP中的人脸识别人脸识别是一
 尺度转换不变特征(SIFT)算法
Jan 22, 2024 pm 05:09 PM
尺度转换不变特征(SIFT)算法
Jan 22, 2024 pm 05:09 PM
尺度不变特征变换(SIFT)算法是一种用于图像处理和计算机视觉领域的特征提取算法。该算法于1999年提出,旨在提高计算机视觉系统中的物体识别和匹配性能。SIFT算法具有鲁棒性和准确性,被广泛应用于图像识别、三维重建、目标检测、视频跟踪等领域。它通过在多个尺度空间中检测关键点,并提取关键点周围的局部特征描述符来实现尺度不变性。SIFT算法的主要步骤包括尺度空间的构建、关键点检测、关键点定位、方向分配和特征描述符生成。通过这些步骤,SIFT算法能够提取出具有鲁棒性和独特性的特征,从而实现对图像的高效
