

使用 matplotlib 和 A* 算法构建无人机导航系统

您有没有想过无人机如何在复杂的环境中导航?在本博客中,我们将使用 Python、Matplotlib 和 A* 算法创建一个简单的无人机导航系统。最后,您将拥有一个可以可视化无人机解决迷宫的工作系统!
你将学到什么
- 基本人工智能术语,如“代理”和“环境”。
- 如何使用 Python 创建和可视化迷宫。
- A* 算法如何解决导航问题。
- 如何实现和可视化无人机的路径。
简介
要构建我们的无人机导航系统,我们需要以下内容:
- 特工:无人机?.
- 路径: 无人机将穿过的 2D 迷宫?️。
- 搜索算法: A* 算法 ⭐.
但首先,让我们为新手快速回顾一下一些基本的人工智能术语。
关键人工智能术语
- 代理:一个实体(如我们的无人机),感知其环境(迷宫)并采取行动以实现目标(到达迷宫的尽头)。
- 环境: 代理运行的世界,这里表示为 2D 迷宫。
- 启发式:用于指导搜索的经验法则或估计(例如测量到目标的距离)。
系统设计
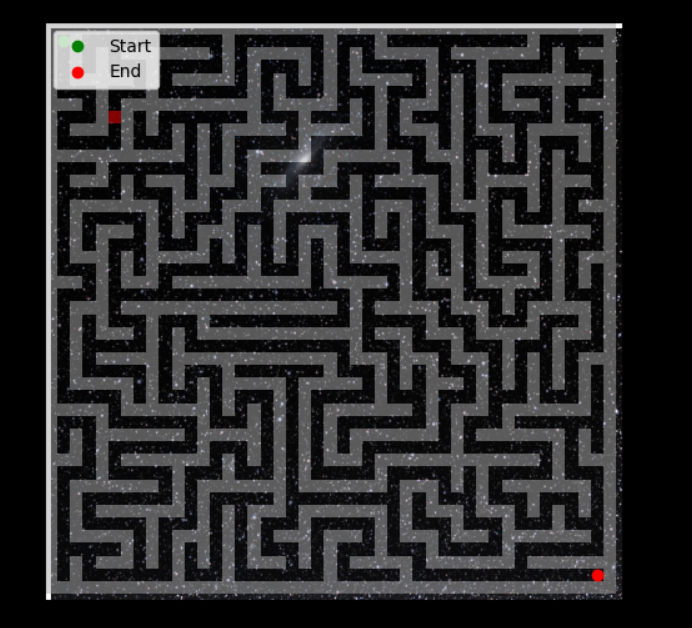
我们的无人机将在二维迷宫中导航。迷宫将包括:
- 墙壁(不可通行区域以 1 表示)。
- 路径(用 0 表示的开放空间)。
无人机的目标:
- 避开墙壁。?
- 到达路径的尽头。?
这是迷宫的样子:
第 1 步:搭建迷宫
导入所需的库
首先,安装并导入所需的库:
import matplotlib.pyplot as plt import numpy as np import random import math from heapq import heappop, heappush
定义迷宫尺寸
让我们定义迷宫大小:
蟒蛇
宽度、高度 = 22, 22
设置方向和重量
在现实世界的导航中,不同方向的移动可能会产生不同的成本。例如,向北移动可能比向东移动更困难。
DIRECTIONAL_WEIGHTS = {'N': 1.2, 'S': 1.0, 'E': 1.5, 'W': 1.3}
DIRECTIONS = {'N': (-1, 0), 'S': (1, 0), 'E': (0, 1), 'W': (0, -1)}
初始化迷宫网格
我们从一个充满墙壁的网格开始(1s):
import matplotlib.pyplot as plt import numpy as np import random import math from heapq import heappop, heappush
麻木的。 Ones() 函数用于创建给定形状和类型的新数组,并用 1 填充...在使用默认值初始化数组时很有用。
第二步:雕刻迷宫
现在让我们定义一个函数,它将“雕刻”在迷宫中开辟路径,迷宫现在仅用墙壁初始化
DIRECTIONAL_WEIGHTS = {'N': 1.2, 'S': 1.0, 'E': 1.5, 'W': 1.3}
DIRECTIONS = {'N': (-1, 0), 'S': (1, 0), 'E': (0, 1), 'W': (0, -1)}
定义起点和终点
maze = np.ones((2 * WIDTH + 1, 2 * HEIGHT + 1), dtype=int)
第三步:可视化迷宫
使用Matplotlib显示迷宫:
def carve(x, y):
maze[2 * x + 1, 2 * y + 1] = 0 # Mark current cell as a path
directions = list(DIRECTIONS.items())
random.shuffle(directions) # Randomize directions
for _, (dx, dy) in directions:
nx, ny = x + dx, y + dy
if 0 <= nx < WIDTH and 0 <= ny < HEIGHT and maze[2 * nx + 1, 2 * ny + 1] == 1:
maze[2 * x + 1 + dx, 2 * y + 1 + dy] = 0
carve(nx, ny)
carve(0, 0) # Start carving from the top-left corner
第 4 步:用 A 解决迷宫*
A* 算法 使用路径成本和启发式的组合来查找加权迷宫中的最短路径。
定义启发式
我们使用欧几里得距离作为我们的启发式:
start = (1, 1) end = (2 * WIDTH - 1, 2 * HEIGHT - 1) maze[start] = 0 maze[end] = 0
A*算法实现
fig, ax = plt.subplots(figsize=(8, 6))
ax.imshow(maze, cmap='binary', interpolation='nearest')
ax.set_title("2D Maze")
plt.show()
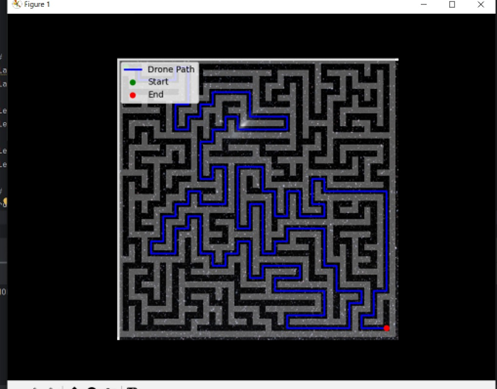
第 5 步:可视化解决方案
我们已经有了迷宫,但你还看不到无人机的路径。
让我们可视化无人机的路径:
def heuristic(a, b):
return math.sqrt((a[0] - b[0]) ** 2 + (a[1] - b[1]) ** 2)
结论
恭喜! ?您已经构建了一个可用的无人机导航系统:
- 生成一个 2D 迷宫。
- 使用 A* 算法解决它。
- 可视化最短路径。

后续步骤
- 尝试不同的迷宫大小和重量。
- 尝试其他启发式方法,例如曼哈顿距离。
- 可视化 3D 迷宫以获得更多复杂性!
请随时分享您的结果或在下面的评论中提出问题。
到无限甚至更远?
以上是使用 matplotlib 和 A* 算法构建无人机导航系统的详细内容。更多信息请关注PHP中文网其他相关文章!

热AI工具

Undresser.AI Undress
人工智能驱动的应用程序,用于创建逼真的裸体照片

AI Clothes Remover
用于从照片中去除衣服的在线人工智能工具。

Undress AI Tool
免费脱衣服图片

Clothoff.io
AI脱衣机

Video Face Swap
使用我们完全免费的人工智能换脸工具轻松在任何视频中换脸!

热门文章
热工具

记事本++7.3.1
好用且免费的代码编辑器

SublimeText3汉化版
中文版,非常好用

禅工作室 13.0.1
功能强大的PHP集成开发环境

Dreamweaver CS6
视觉化网页开发工具

SublimeText3 Mac版
神级代码编辑软件(SublimeText3)



 Python:游戏,Guis等
Apr 13, 2025 am 12:14 AM
Python:游戏,Guis等
Apr 13, 2025 am 12:14 AM
Python在游戏和GUI开发中表现出色。1)游戏开发使用Pygame,提供绘图、音频等功能,适合创建2D游戏。2)GUI开发可选择Tkinter或PyQt,Tkinter简单易用,PyQt功能丰富,适合专业开发。
 Python与C:学习曲线和易用性
Apr 19, 2025 am 12:20 AM
Python与C:学习曲线和易用性
Apr 19, 2025 am 12:20 AM
Python更易学且易用,C 则更强大但复杂。1.Python语法简洁,适合初学者,动态类型和自动内存管理使其易用,但可能导致运行时错误。2.C 提供低级控制和高级特性,适合高性能应用,但学习门槛高,需手动管理内存和类型安全。
 Python和时间:充分利用您的学习时间
Apr 14, 2025 am 12:02 AM
Python和时间:充分利用您的学习时间
Apr 14, 2025 am 12:02 AM
要在有限的时间内最大化学习Python的效率,可以使用Python的datetime、time和schedule模块。1.datetime模块用于记录和规划学习时间。2.time模块帮助设置学习和休息时间。3.schedule模块自动化安排每周学习任务。
 Python vs.C:探索性能和效率
Apr 18, 2025 am 12:20 AM
Python vs.C:探索性能和效率
Apr 18, 2025 am 12:20 AM
Python在开发效率上优于C ,但C 在执行性能上更高。1.Python的简洁语法和丰富库提高开发效率。2.C 的编译型特性和硬件控制提升执行性能。选择时需根据项目需求权衡开发速度与执行效率。
 Python标准库的哪一部分是:列表或数组?
Apr 27, 2025 am 12:03 AM
Python标准库的哪一部分是:列表或数组?
Apr 27, 2025 am 12:03 AM
pythonlistsarepartofthestAndArdLibrary,herilearRaysarenot.listsarebuilt-In,多功能,和Rused ForStoringCollections,而EasaraySaraySaraySaraysaraySaraySaraysaraySaraysarrayModuleandleandleandlesscommonlyusedDduetolimitedFunctionalityFunctionalityFunctionality。
 学习Python:2小时的每日学习是否足够?
Apr 18, 2025 am 12:22 AM
学习Python:2小时的每日学习是否足够?
Apr 18, 2025 am 12:22 AM
每天学习Python两个小时是否足够?这取决于你的目标和学习方法。1)制定清晰的学习计划,2)选择合适的学习资源和方法,3)动手实践和复习巩固,可以在这段时间内逐步掌握Python的基本知识和高级功能。
 Python:自动化,脚本和任务管理
Apr 16, 2025 am 12:14 AM
Python:自动化,脚本和任务管理
Apr 16, 2025 am 12:14 AM
Python在自动化、脚本编写和任务管理中表现出色。1)自动化:通过标准库如os、shutil实现文件备份。2)脚本编写:使用psutil库监控系统资源。3)任务管理:利用schedule库调度任务。Python的易用性和丰富库支持使其在这些领域中成为首选工具。
 Python vs. C:了解关键差异
Apr 21, 2025 am 12:18 AM
Python vs. C:了解关键差异
Apr 21, 2025 am 12:18 AM
Python和C 各有优势,选择应基于项目需求。1)Python适合快速开发和数据处理,因其简洁语法和动态类型。2)C 适用于高性能和系统编程,因其静态类型和手动内存管理。
