

BP神经网络算法(2)

// BpNet.h:interfacefortheBpclass. // // E-Mail:zengzhijun369@163.com /**/ ///////////////////////////////////////////////////////////////////// / #include stdafx.h #include BpNet.h #include math.h #ifdef_DEBUG #undef THIS_FILE static char
//BpNet.h: interface for the Bp class.
 //
//
//E-Mail:zengzhijun369@163.com

 /**///////////////////////////////////////////////////////////////////////
/**///////////////////////////////////////////////////////////////////////
#include "stdafx.h"
#include "BpNet.h"
#include "math.h"
#ifdef _DEBUG
#undef THIS_FILE
static char THIS_FILE[]=__FILE__;
#define new DEBUG_NEW
#endif
/**///////////////////////////////////////////////////////////////////////
// Construction/Destruction
/**///////////////////////////////////////////////////////////////////////
BpNet::BpNet()
 {
{
 error=1.0;
error=1.0;
e=0.0;
rate_w=0.05; //权值学习率(输入层--隐含层)
rate_w1=0.047; //权值学习率 (隐含层--输出层)
rate_b1=0.05; //隐含层阀值学习率
rate_b2=0.047; //输出层阀值学习率
error=1.0;
e=0.0;
rate_w=0.05; //权值学习率(输入层--隐含层)
rate_w1=0.047; //权值学习率 (隐含层--输出层)
rate_b1=0.05; //隐含层阀值学习率
rate_b2=0.047; //输出层阀值学习率
 }
}
BpNet::~BpNet()
{
}
void winit(double w[],int sl)//权值初始化
{int i;
double randx();

 for(i=0;isl;i++){
for(i=0;isl;i++){
*(w+i)=0.2*randx();
 }
}
}
double randx()//kqy error
{double d;
d=(double) rand()/32767.0;
return d;
}
void BpNet::init()
{
winit((double*)w,innode*hidenode);
winit((double*)w1,hidenode*outnode);
winit(b1,hidenode);
winit(b2,outnode);
}
void BpNet::train(double p[trainsample][innode],double t[trainsample][outnode])
{
double pp[hidenode];//隐含结点的校正误差
double qq[outnode];//希望输出值与实际输出值的偏差
double yd[outnode];//希望输出值
double x[innode]; //输入向量
double x1[hidenode];//隐含结点状态值
double x2[outnode];//输出结点状态值
double o1[hidenode];//隐含层激活值
double o2[hidenode];//输出层激活值
for(int isamp=0;isamptrainsample;isamp++)//循环训练一次样品
{
for(int i=0;iinnode;i++)
x[i]=p[isamp][i];
for(i=0;ioutnode;i++)
yd[i]=t[isamp][i];
//构造每个样品的输入和输出标准
for(int j=0;jhidenode;j++)
{
o1[j]=0.0;
for(i=0;iinnode;i++)
o1[j]=o1[j]+w[i][j]*x[i];//隐含层各单元输入激活值
x1[j]=1.0/(1+exp(-o1[j]-b1[j]));//隐含层各单元的输出kqy1
// if(o1[j]+b1[j]>0) x1[j]=1;
//else x1[j]=0;
}
for(int k=0;koutnode;k++)
{
o2[k]=0.0;
for(j=0;jhidenode;j++)
o2[k]=o2[k]+w1[j][k]*x1[j];//输出层各单元输入激活值
x2[k]=1.0/(1.0+exp(-o2[k]-b2[k]));//输出层各单元输出
// if(o2[k]+b2[k]>0) x2[k]=1;
// else x2[k]=0;
}
for(k=0;koutnode;k++)
{
e=0.0;
qq[k]=(yd[k]-x2[k])*x2[k]*(1.-x2[k]);//希望输出与实际输出的偏差
e+=fabs(yd[k]-x2[k])*fabs(yd[k]-x2[k]);//计算均方差
for(j=0;jhidenode;j++)
w1[j][k]=w1[j][k]+rate_w1*qq[k]*x1[j];//下一次的隐含层和输出层之间的新连接权
e=sqrt(e);
error=e;
}
for(j=0;jhidenode;j++)
{
pp[j]=0.0;
for(k=0;koutnode;k++)
pp[j]=pp[j]+qq[k]*w1[j][k];
pp[j]=pp[j]*x1[j]*(1-x1[j]);//隐含层的校正误差
for(i=0;iinnode;i++)
w[i][j]=w[i][j]+rate_w*pp[j]*x[i];//下一次的输入层和隐含层之间的新连接权
}
for(k=0;koutnode;k++)
b2[k]=b2[k]+rate_b2*qq[k];//下一次的隐含层和输出层之间的新阈值
for(j=0;jhidenode;j++)
b1[j]=b1[j]+rate_b1*pp[j];//下一次的输入层和隐含层之间的新阈值
}//end isamp样品循环
}
/**////////////////////////////end train/////////////////////////////
/////////////////////////////////////////////////////////////////
double *BpNet::recognize(double *p)
{
double x[innode]; //输入向量
double x1[hidenode];//隐含结点状态值
double x2[outnode];//输出结点状态值
double o1[hidenode];//隐含层激活值
double o2[hidenode];//输出层激活值
for(int i=0;iinnode;i++)
x[i]=p[i];
for(int j=0;jhidenode;j++)
{
o1[j]=0.0;
for(int i=0;iinnode;i++)
o1[j]=o1[j]+w[i][j]*x[i];//隐含层各单元激活值
x1[j]=1.0/(1.0+exp(-o1[j]-b1[j]));//隐含层各单元输出
//if(o1[j]+b1[j]>0) x1[j]=1;
// else x1[j]=0;
}
for(int k=0;koutnode;k++)
{
o2[k]=0.0;
for(int j=0;jhidenode;j++)
o2[k]=o2[k]+w1[j][k]*x1[j];//输出层各单元激活值
x2[k]=1.0/(1.0+exp(-o2[k]-b2[k]));//输出层各单元输出
//if(o2[k]+b2[k]>0) x2[k]=1;
//else x2[k]=0;
}
for(k=0;koutnode;k++)
{
shuchu[k]=x2[k];
}
return shuchu;
}/**/////////////////////////////end sim///////////////////////////
void BpNet::writetrain()
{//曾志军 for 2006.7
AfxMessageBox("你还没有训练呢,训练后再写吧!请不要乱写,除非你认为这次训练是最好的,否则会覆盖我训练好的权值,那样你又要花时间训练!");
AfxMessageBox("你认为这次训练结果是最好的,就存下来,下次就不要花时间训练了!",MB_YESNO,NULL);
FILE *stream0;
FILE *stream1;
FILE *stream2;
FILE *stream3;


Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

Video Face Swap
Tukar muka dalam mana-mana video dengan mudah menggunakan alat tukar muka AI percuma kami!

Artikel Panas
Alat panas

Notepad++7.3.1
Editor kod yang mudah digunakan dan percuma

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Hantar Studio 13.0.1
Persekitaran pembangunan bersepadu PHP yang berkuasa

Dreamweaver CS6
Alat pembangunan web visual

SublimeText3 versi Mac
Perisian penyuntingan kod peringkat Tuhan (SublimeText3)
Topik panas
 1666
1666
 14
1426
52
1328
25
1273
29
1254
24
14
1426
52
1328
25
1273
29
1254
24

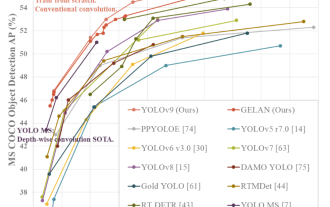 YOLO adalah abadi! YOLOv9 dikeluarkan: prestasi dan kelajuan SOTA~
Feb 26, 2024 am 11:31 AM
YOLO adalah abadi! YOLOv9 dikeluarkan: prestasi dan kelajuan SOTA~
Feb 26, 2024 am 11:31 AM
Kaedah pembelajaran mendalam hari ini memberi tumpuan kepada mereka bentuk fungsi objektif yang paling sesuai supaya keputusan ramalan model paling hampir dengan situasi sebenar. Pada masa yang sama, seni bina yang sesuai mesti direka bentuk untuk mendapatkan maklumat yang mencukupi untuk ramalan. Kaedah sedia ada mengabaikan fakta bahawa apabila data input mengalami pengekstrakan ciri lapisan demi lapisan dan transformasi spatial, sejumlah besar maklumat akan hilang. Artikel ini akan menyelidiki isu penting apabila menghantar data melalui rangkaian dalam, iaitu kesesakan maklumat dan fungsi boleh balik. Berdasarkan ini, konsep maklumat kecerunan boleh atur cara (PGI) dicadangkan untuk menghadapi pelbagai perubahan yang diperlukan oleh rangkaian dalam untuk mencapai pelbagai objektif. PGI boleh menyediakan maklumat input lengkap untuk tugas sasaran untuk mengira fungsi objektif, dengan itu mendapatkan maklumat kecerunan yang boleh dipercayai untuk mengemas kini berat rangkaian. Di samping itu, rangka kerja rangkaian ringan baharu direka bentuk
 CLIP-BEVFormer: Selia secara eksplisit struktur BEVFormer untuk meningkatkan prestasi pengesanan ekor panjang
Mar 26, 2024 pm 12:41 PM
CLIP-BEVFormer: Selia secara eksplisit struktur BEVFormer untuk meningkatkan prestasi pengesanan ekor panjang
Mar 26, 2024 pm 12:41 PM
Ditulis di atas & pemahaman peribadi penulis: Pada masa ini, dalam keseluruhan sistem pemanduan autonomi, modul persepsi memainkan peranan penting Hanya selepas kenderaan pemanduan autonomi yang memandu di jalan raya memperoleh keputusan persepsi yang tepat melalui modul persepsi boleh Peraturan hiliran dan. modul kawalan dalam sistem pemanduan autonomi membuat pertimbangan dan keputusan tingkah laku yang tepat pada masanya dan betul. Pada masa ini, kereta dengan fungsi pemanduan autonomi biasanya dilengkapi dengan pelbagai penderia maklumat data termasuk penderia kamera pandangan sekeliling, penderia lidar dan penderia radar gelombang milimeter untuk mengumpul maklumat dalam modaliti yang berbeza untuk mencapai tugas persepsi yang tepat. Algoritma persepsi BEV berdasarkan penglihatan tulen digemari oleh industri kerana kos perkakasannya yang rendah dan penggunaan mudah, dan hasil keluarannya boleh digunakan dengan mudah untuk pelbagai tugas hiliran.
 Melaksanakan Algoritma Pembelajaran Mesin dalam C++: Cabaran dan Penyelesaian Biasa
Jun 03, 2024 pm 01:25 PM
Melaksanakan Algoritma Pembelajaran Mesin dalam C++: Cabaran dan Penyelesaian Biasa
Jun 03, 2024 pm 01:25 PM
Cabaran biasa yang dihadapi oleh algoritma pembelajaran mesin dalam C++ termasuk pengurusan memori, multi-threading, pengoptimuman prestasi dan kebolehselenggaraan. Penyelesaian termasuk menggunakan penunjuk pintar, perpustakaan benang moden, arahan SIMD dan perpustakaan pihak ketiga, serta mengikuti garis panduan gaya pengekodan dan menggunakan alat automasi. Kes praktikal menunjukkan cara menggunakan perpustakaan Eigen untuk melaksanakan algoritma regresi linear, mengurus memori dengan berkesan dan menggunakan operasi matriks berprestasi tinggi.
 Terokai prinsip asas dan pemilihan algoritma bagi fungsi isihan C++
Apr 02, 2024 pm 05:36 PM
Terokai prinsip asas dan pemilihan algoritma bagi fungsi isihan C++
Apr 02, 2024 pm 05:36 PM
Lapisan bawah fungsi C++ sort menggunakan isihan gabungan, kerumitannya ialah O(nlogn), dan menyediakan pilihan algoritma pengisihan yang berbeza, termasuk isihan pantas, isihan timbunan dan isihan stabil.
 Bolehkah kecerdasan buatan meramalkan jenayah? Terokai keupayaan CrimeGPT
Mar 22, 2024 pm 10:10 PM
Bolehkah kecerdasan buatan meramalkan jenayah? Terokai keupayaan CrimeGPT
Mar 22, 2024 pm 10:10 PM
Konvergensi kecerdasan buatan (AI) dan penguatkuasaan undang-undang membuka kemungkinan baharu untuk pencegahan dan pengesanan jenayah. Keupayaan ramalan kecerdasan buatan digunakan secara meluas dalam sistem seperti CrimeGPT (Teknologi Ramalan Jenayah) untuk meramal aktiviti jenayah. Artikel ini meneroka potensi kecerdasan buatan dalam ramalan jenayah, aplikasi semasanya, cabaran yang dihadapinya dan kemungkinan implikasi etika teknologi tersebut. Kecerdasan Buatan dan Ramalan Jenayah: Asas CrimeGPT menggunakan algoritma pembelajaran mesin untuk menganalisis set data yang besar, mengenal pasti corak yang boleh meramalkan di mana dan bila jenayah mungkin berlaku. Set data ini termasuk statistik jenayah sejarah, maklumat demografi, penunjuk ekonomi, corak cuaca dan banyak lagi. Dengan mengenal pasti trend yang mungkin terlepas oleh penganalisis manusia, kecerdasan buatan boleh memperkasakan agensi penguatkuasaan undang-undang
 1.3ms mengambil masa 1.3ms! Seni bina rangkaian neural mudah alih sumber terbuka terbaru Tsinghua RepViT
Mar 11, 2024 pm 12:07 PM
1.3ms mengambil masa 1.3ms! Seni bina rangkaian neural mudah alih sumber terbuka terbaru Tsinghua RepViT
Mar 11, 2024 pm 12:07 PM
Alamat kertas: https://arxiv.org/abs/2307.09283 Alamat kod: https://github.com/THU-MIG/RepViTRepViT berprestasi baik dalam seni bina ViT mudah alih dan menunjukkan kelebihan yang ketara. Seterusnya, kami meneroka sumbangan kajian ini. Disebutkan dalam artikel bahawa ViT ringan biasanya berprestasi lebih baik daripada CNN ringan pada tugas visual, terutamanya disebabkan oleh modul perhatian diri berbilang kepala (MSHA) mereka yang membolehkan model mempelajari perwakilan global. Walau bagaimanapun, perbezaan seni bina antara ViT ringan dan CNN ringan belum dikaji sepenuhnya. Dalam kajian ini, penulis menyepadukan ViT ringan ke dalam yang berkesan
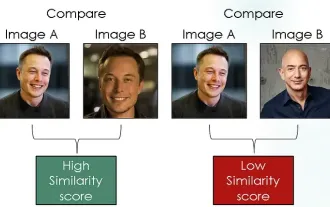 Meneroka rangkaian Siam menggunakan kehilangan kontrastif untuk perbandingan persamaan imej
Apr 02, 2024 am 11:37 AM
Meneroka rangkaian Siam menggunakan kehilangan kontrastif untuk perbandingan persamaan imej
Apr 02, 2024 am 11:37 AM
Pengenalan Dalam bidang penglihatan komputer, mengukur kesamaan imej dengan tepat adalah tugas kritikal dengan pelbagai aplikasi praktikal. Daripada enjin carian imej kepada sistem pengecaman muka dan sistem pengesyoran berasaskan kandungan, keupayaan untuk membandingkan dan mencari imej serupa dengan cekap adalah penting. Rangkaian Siam digabungkan dengan kehilangan kontras menyediakan rangka kerja yang kuat untuk mempelajari persamaan imej dalam cara yang dipacu data. Dalam catatan blog ini, kami akan menyelami butiran rangkaian Siam, meneroka konsep kehilangan kontras dan meneroka cara kedua-dua komponen ini berfungsi bersama untuk mencipta model persamaan imej yang berkesan. Pertama, rangkaian Siam terdiri daripada dua subrangkaian yang sama yang berkongsi berat dan parameter yang sama. Setiap sub-rangkaian mengekod imej input ke dalam vektor ciri, yang
 Algoritma pengesanan yang dipertingkatkan: untuk pengesanan sasaran dalam imej penderiaan jauh optik resolusi tinggi
Jun 06, 2024 pm 12:33 PM
Algoritma pengesanan yang dipertingkatkan: untuk pengesanan sasaran dalam imej penderiaan jauh optik resolusi tinggi
Jun 06, 2024 pm 12:33 PM
01Garis prospek Pada masa ini, sukar untuk mencapai keseimbangan yang sesuai antara kecekapan pengesanan dan hasil pengesanan. Kami telah membangunkan algoritma YOLOv5 yang dipertingkatkan untuk pengesanan sasaran dalam imej penderiaan jauh optik resolusi tinggi, menggunakan piramid ciri berbilang lapisan, strategi kepala pengesanan berbilang dan modul perhatian hibrid untuk meningkatkan kesan rangkaian pengesanan sasaran dalam imej penderiaan jauh optik. Menurut set data SIMD, peta algoritma baharu adalah 2.2% lebih baik daripada YOLOv5 dan 8.48% lebih baik daripada YOLOX, mencapai keseimbangan yang lebih baik antara hasil pengesanan dan kelajuan. 02 Latar Belakang & Motivasi Dengan perkembangan pesat teknologi penderiaan jauh, imej penderiaan jauh optik resolusi tinggi telah digunakan untuk menggambarkan banyak objek di permukaan bumi, termasuk pesawat, kereta, bangunan, dll. Pengesanan objek dalam tafsiran imej penderiaan jauh
