

Rocketpy -Analytics Vidhya를 사용한 로켓 런칭 시뮬레이션 및 분석

Rocketpy : 포괄적 인 가이드로 로켓 발사 시뮬레이션
이 기사는 강력한 파이썬 라이브러리 인 Rocketpy를 사용하여 고출력 로켓 런칭을 시뮬레이션하는 것을 안내합니다. 로켓 구성 요소 정의에서 시뮬레이션 결과 분석 및 데이터 시각화에 이르기까지 모든 것을 다룹니다. 학생이든 노련한 엔지니어이든이 자습서는 실용적이고 실습 경험을 제공합니다.
학습 목표 :
- 로켓 런칭 시뮬레이션을위한 마스터 로켓.
- 로켓 구성 요소 (모터, 본체, 지느러미, 낙하산)를 구성하십시오.
- 비행 시뮬레이션을 수행하고 해석합니다.
- matplotlib를 사용하여 데이터를 시각화하고 푸리에 분석을 수행하십시오.
- 일반적인 시뮬레이션 문제를 해결하십시오.
(이 기사는 데이터 과학 블로그의 일부입니다.)
목차 :
- 소개
- Rocketpy 란 무엇입니까?
- 필요한 데이터 다운로드
- 라이브러리 및 환경 설정 가져 오기
- 견고한 모터 사양 이해
- 로켓 치수 및 부품 구성
- 낙하산 추가 및 구성
- 시뮬레이션 실행 및 분석
- 궤적을 KML로 내보내는 것
- 데이터 분석 및 시각화
- 결론
- 자주 묻는 질문
Rocketpy 란 무엇입니까?
Rocketpy는 고출력 로켓 항공편을 시뮬레이션하고 분석하기위한 파이썬 라이브러리입니다. 로켓 구성 요소 (솔리드 모터, 지느러미, 낙하산)를 모델링하고 출시 및 비행 중에 동작을 시뮬레이션합니다. 사용자는 플롯 및 데이터 내보내기를 통해 로켓 매개 변수를 정의하고 시뮬레이션을 실행하며 결과를 시각화합니다.
필요한 데이터 다운로드 :
시뮬레이션을 위해이 파일을 다운로드하십시오.
! PIP Rocketpy 설치 ! curl -o naca0012-radians.csv https://raw.githubusercontent.com/rocketpy-team/rocketpy/master/data/calisto/naca0012-radians.csv ! curl -o cesaroni_m1670.eng https://raw.githubusercontent.com/rocketpy-team/rocketpy/master/data/motors/cesaroni_m1670.eng ! curl -o poweroffdragcurve.csv https://raw.githubusercontent.com/rocketpy-team/rocketpy/master/data/calisto/poweroffdragcurve.csv ! curl -o powerondragcurve.csv https://raw.githubusercontent.com/rocketpy-team/rocketpy/master/data/calisto/powerondragcurve.csv
라이브러리 가져 오기 및 환경 설정 :
필요한 라이브러리를 가져오고 위치 및 대기 조건을 정의하십시오.
로켓 수입 환경, SolidMotor, Rocket, Flight에서 DateTime 가져 오기 # 환경 초기화 Env = 환경 (위도 = 32.990254, 경도 = -106.974998, 고도 = 1400) 내일 = datetime.date.today () datetime.timedelta (days = 1) env.set_date ((내일. Env.set_atmospheric_model (type = "예측", file = "gfs") Env.Info ()

Environment 클래스는 정확한 시뮬레이션을 위해 지리적 위치와 대기 조건을 설정합니다.
견고한 운동 특성 이해 :
모터 매개 변수 정의 (스러스트, 치수, 속성) :
pro75m1670 = solidmotor (
thrust_source = "cesaroni_m1670.eng",
dry_mass = 1.815,
dry_inertia = (0.125, 0.125, 0.002),
nozzle_radius = 33 / 1000,
grain_number = 5,
grain_density = 1815,
grain_outer_radius = 33 / 1000,
grain_initial_inner_radius = 15 / 1000,
grain_initial_height = 120 / 1000,
grain_separation = 5 / 1000,
grains_center_of_mass_position = 0.397,
center_of_dry_mass_position = 0.317,
nozzle_position = 0,
burn_time = 3.9,
Throat_radius = 11 / 1000,
coordinate_system_orientation = "nozzle_to_combustion_chamber",
))
pro75m1670.info () 
SolidMotor 클래스는 모터의 물리적 및 성능 특성을 정의합니다.
로켓 치수 및 구성 요소 구성 :
로켓 매개 변수 정의 (치수, 구성 요소, 모터 통합) :
Calisto = 로켓 (
반경 = 127 / 2000,
질량 = 14.426,
관성 = (6.321, 6.321, 0.034),
power_off_drag = "PowerOffDragCurve.csv",
power_on_drag = "PowerOndRagCurve.csv",
center_of_mass_without_motor = 0,
coordinate_system_orientation = "tail_to_nose",
))
calisto.set_rail_buttons (topper_button_position = 0.0818, lower_button_position = -0.618, angular_position = 45)
calisto.add_motor (pro75m1670, 위치 = -1.255)
calisto.add_nose (길이 = 0.55829, 종류 = "vonkarman", 위치 = 1.278)
calisto.add_trapezoidal_fins (n = 4, root_chord = 0.120, tip_chord = 0.060, span = 0.110, 위치 = -1.04956, cant_angle = 0.5, airfoil = ( "NACA0012-radians.csv", "radians")
calisto.add_tail (top_radius = 0.0635, bottom_radius = 0.0435, 길이 = 0.060, 위치 = -1.194656)
calisto.all_info () 
Rocket 클래스는 로켓의 구조 (핀, 코 원뿔)를 정의하여 안정성과 공기 역학에 영향을 미칩니다. 대량 음모가 따릅니다.




낙하산 추가 및 구성 :
안전한 회복을 위해 낙하산 추가 :
main = calisto.add_parachute (
"기본",
CD_S = 10.0,
트리거 = 800,
sampling_rate = 105,
LAG = 1.5,
노이즈 = (0, 8.3, 0.5),
))
drogue = calisto.add_parachute (
"띄우는 닻",
CD_S = 1.0,
트리거 = "apogee",
sampling_rate = 105,
LAG = 1.5,
노이즈 = (0, 8.3, 0.5),
)) 


낙하산은 통제 된 하강에 중요합니다. 드래그 계수 및 배포 고도와 같은 매개 변수가 중요합니다.
시뮬레이션 실행 및 분석 :
비행 시뮬레이션 실행 :
test_flight = 비행 (
Rocket = Calisto, Environment = Env, Rail_length = 5.2, 경사 = 85, adging = 0
))
test_flight.all_info () 
Flight 클래스는 궤적을 시뮬레이션합니다.
KML로 궤적 내보내기 :
Google 어스에서 시각화를 위해 궤적을 내 보냅니다.
test_flight.export_kml (file_name = "trajectory.kml", elbtrude = true, allitude_mode = "regal_to_ground")
데이터 분석 및 시각화 :
분석 및 결과를 시각화합니다 (질량, 리프트 오프 속도, 푸리에 분석 별 Apogee) :
rocketpy.utilities import apogee_by_mass, heaptoff_speed_by_mass Numpy를 NP로 가져옵니다 matplotlib.pyplot을 plt로 가져옵니다 # ... (플로팅 및 푸리에 분석을위한 코드) ...

시각화는 로켓 성능과 역학을 이해하는 데 도움이됩니다.
결론:
Rocketpy는 로켓 비행 시뮬레이션 및 분석을위한 강력한 프레임 워크를 제공합니다. 이 튜토리얼은 완전한 연습을 제공하여 사용자가 시뮬레이션을 수행하고 결과를 분석하며 데이터를 효과적으로 시각화 할 수 있습니다.
주요 테이크 아웃 :
- 포괄적 인 로켓 시뮬레이션 프로세스.
- 실습 파이썬 코드 예제.
- 정확한 시뮬레이션을위한 구성 요소 구성의 중요성.
- 비행 역학을 더 잘 이해하기위한 데이터 시각화.
- 문제 해결 팁 및 리소스.
자주 묻는 질문 :
- Q1 : Rocketpy 란 무엇입니까? A : 고출력 로켓 비행을 시뮬레이션하고 분석하기위한 파이썬 라이브러리.
- Q2 : Rocketpy를 설치하는 방법? A :
pip install rocketpy사용하십시오. - Q3 : 오류가 발생하면 어떻게해야합니까? A : 매개 변수, 데이터 파일 및 경로를 확인하십시오. 자원 문제 해결을 참조하십시오.
- Q4 : 결과를 시각화하는 방법? A : Google Earth의 KML로 내보내고 사용자 정의 플롯에는 Matplotlib를 사용하십시오.
(참고 : 이미지는이 응답에 의해 소유되지 않으며 입력에 제공된대로 사용됩니다.)
위 내용은 Rocketpy -Analytics Vidhya를 사용한 로켓 런칭 시뮬레이션 및 분석의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

핫 AI 도구

Undresser.AI Undress
사실적인 누드 사진을 만들기 위한 AI 기반 앱

AI Clothes Remover
사진에서 옷을 제거하는 온라인 AI 도구입니다.

Undress AI Tool
무료로 이미지를 벗다

Clothoff.io
AI 옷 제거제

Video Face Swap
완전히 무료인 AI 얼굴 교환 도구를 사용하여 모든 비디오의 얼굴을 쉽게 바꾸세요!

인기 기사
뜨거운 도구

메모장++7.3.1
사용하기 쉬운 무료 코드 편집기

SublimeText3 중국어 버전
중국어 버전, 사용하기 매우 쉽습니다.

스튜디오 13.0.1 보내기
강력한 PHP 통합 개발 환경

드림위버 CS6
시각적 웹 개발 도구

SublimeText3 Mac 버전
신 수준의 코드 편집 소프트웨어(SublimeText3)



 Meta Llama 3.2- 분석 Vidhya를 시작합니다
Apr 11, 2025 pm 12:04 PM
Meta Llama 3.2- 분석 Vidhya를 시작합니다
Apr 11, 2025 pm 12:04 PM
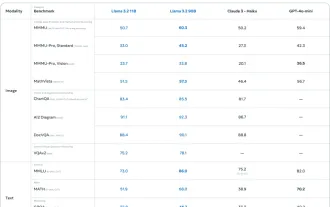
메타의 라마 3.2 : 멀티 모달 및 모바일 AI의 도약 Meta는 최근 AI에서 강력한 비전 기능과 모바일 장치에 최적화 된 가벼운 텍스트 모델을 특징으로하는 AI의 상당한 발전 인 Llama 3.2를 공개했습니다. 성공을 바탕으로 o
 10 생성 AI 코드의 생성 AI 코딩 확장 대 코드를 탐색해야합니다.
Apr 13, 2025 am 01:14 AM
10 생성 AI 코드의 생성 AI 코딩 확장 대 코드를 탐색해야합니다.
Apr 13, 2025 am 01:14 AM
이봐, 코딩 닌자! 하루 동안 어떤 코딩 관련 작업을 계획 했습니까? 이 블로그에 더 자세히 살펴보기 전에, 나는 당신이 당신의 모든 코딩 관련 문제에 대해 생각하기를 원합니다. 완료? - ’
 AV 바이트 : Meta ' S Llama 3.2, Google의 Gemini 1.5 등
Apr 11, 2025 pm 12:01 PM
AV 바이트 : Meta ' S Llama 3.2, Google의 Gemini 1.5 등
Apr 11, 2025 pm 12:01 PM
이번 주 AI 환경 : 발전의 회오리 바람, 윤리적 고려 사항 및 규제 토론. OpenAi, Google, Meta 및 Microsoft와 같은 주요 플레이어
 직원에게 AI 전략 판매 : Shopify CEO의 선언문
Apr 10, 2025 am 11:19 AM
직원에게 AI 전략 판매 : Shopify CEO의 선언문
Apr 10, 2025 am 11:19 AM
Shopify CEO Tobi Lütke의 최근 메모는 AI 숙련도가 모든 직원에 대한 근본적인 기대를 대담하게 선언하여 회사 내에서 중요한 문화적 변화를 표시합니다. 이것은 도망가는 트렌드가 아닙니다. 그것은 p에 통합 된 새로운 운영 패러다임입니다
 비전 언어 모델 (VLMS)에 대한 포괄적 인 안내서
Apr 12, 2025 am 11:58 AM
비전 언어 모델 (VLMS)에 대한 포괄적 인 안내서
Apr 12, 2025 am 11:58 AM
소개 생생한 그림과 조각으로 둘러싸인 아트 갤러리를 걷는 것을 상상해보십시오. 이제 각 작품에 질문을하고 의미있는 대답을 얻을 수 있다면 어떨까요? “어떤 이야기를하고 있습니까?
 GPT-4O vs Openai O1 : 새로운 OpenAI 모델은 과대 광고 가치가 있습니까?
Apr 13, 2025 am 10:18 AM
GPT-4O vs Openai O1 : 새로운 OpenAI 모델은 과대 광고 가치가 있습니까?
Apr 13, 2025 am 10:18 AM
소개 OpenAi는 기대가 많은 "Strawberry"아키텍처를 기반으로 새로운 모델을 출시했습니다. O1로 알려진이 혁신적인 모델은 추론 기능을 향상시켜 문제를 통해 생각할 수 있습니다.
 SQL에서 열을 추가하는 방법? - 분석 Vidhya
Apr 17, 2025 am 11:43 AM
SQL에서 열을 추가하는 방법? - 분석 Vidhya
Apr 17, 2025 am 11:43 AM
SQL의 Alter Table 문 : 데이터베이스에 열을 동적으로 추가 데이터 관리에서 SQL의 적응성이 중요합니다. 데이터베이스 구조를 즉시 조정해야합니까? Alter Table 문은 솔루션입니다. 이 안내서는 Colu를 추가합니다
 최고의 프롬프트 엔지니어링 기술의 최신 연간 편집
Apr 10, 2025 am 11:22 AM
최고의 프롬프트 엔지니어링 기술의 최신 연간 편집
Apr 10, 2025 am 11:22 AM
내 칼럼을 처음 접할 수있는 분들을 위해, 나는 구체화 된 AI, AI 추론, AI의 첨단 획기적인 혁신, AI 교육, AI의 수비, ai re
