
 Technologie-Peripheriegeräte
KI
Durch die Anpassung an verschiedene Formen und Aufgaben wurde das leistungsstärkste Open-Source-Roboter-Lernsystem „Octopus' geboren
Technologie-Peripheriegeräte
KI
Durch die Anpassung an verschiedene Formen und Aufgaben wurde das leistungsstärkste Open-Source-Roboter-Lernsystem „Octopus' geboren
Durch die Anpassung an verschiedene Formen und Aufgaben wurde das leistungsstärkste Open-Source-Roboter-Lernsystem „Octopus' geboren

In Bezug auf das Lernen von Robotern besteht ein gängiger Ansatz darin, einen Datensatz zu sammeln, der für einen bestimmten Roboter und eine bestimmte Aufgabe spezifisch ist, und ihn dann zum Trainieren einer Richtlinie zu verwenden. Wenn diese Methode jedoch verwendet wird, um von Grund auf zu lernen, müssen für jede Aufgabe ausreichend Daten gesammelt werden, und die Generalisierungsfähigkeit der resultierenden Richtlinie ist normalerweise schlecht.
„Grundsätzlich können Erfahrungen, die mit anderen Robotern und Aufgaben gesammelt wurden, mögliche Lösungen liefern, die es dem Modell ermöglichen, eine Vielzahl von Robotersteuerungsproblemen zu erkennen, und diese Probleme können die allgemeine Leistung des Roboters bei nachgelagerten Aufgaben verbessern.“ Da es sich um allgemeine Modelle handelt, die eine Vielzahl natürlicher Sprach- und Computer-Vision-Aufgaben bewältigen können, ist es immer noch schwierig, ein „universelles Robotermodell“ zu erstellen, um eine einheitliche Steuerungsstrategie für den Roboter zu trainieren. Extrem schwierig und mit vielen Schwierigkeiten verbunden, einschließlich der Bedienung verschiedener Roboterkörper. Sensorkonfigurationen, Aktionsräume, Aufgabenspezifikationen, Umgebungen und Rechenbudgets.
Um dieses Ziel zu erreichen, sind einige Forschungsergebnisse im Zusammenhang mit dem „Roboter-Grundmodell“ erschienen. Ihr Ansatz besteht darin, Roboterbeobachtungen direkt in Aktionen abzubilden und sie dann durch Null-Beispiel-Lösungen auf neue Bereiche oder neue Roboter zu übertragen. Diese Modelle werden oft als „generalistische Roboterrichtlinien“ oder GRPs bezeichnet, die die Fähigkeit des Roboters betonen, eine visuomotorische Kontrolle auf niedriger Ebene über eine Vielzahl von Aufgaben, Umgebungen und Robotersystemen hinweg durchzuführen.
GNM (Allgemeines Navigationsmodell) eignet sich für eine Vielzahl unterschiedlicher Roboternavigationsszenarien. RT-X kann je nach Missionsziel fünf verschiedene Roboterkörper bedienen. Obwohl diese Modelle tatsächlich einen wichtigen Fortschritt darstellen, weisen sie auch mehrere Einschränkungen auf: Ihre Eingabebeobachtungen sind oft vordefiniert und oft begrenzt (z. B. ist es schwierig, sie in diesen Bereichen effektiv zu optimieren); Modelle Die größten Versionen stehen nicht zur Nutzung zur Verfügung (das ist wichtig).
Kürzlich veröffentlichte das Octo Model Team, bestehend aus 18 Forschern der University of California, Berkeley, der Stanford University, der Carnegie Mellon University und Google DeepMind, seine bahnbrechenden Forschungsergebnisse: das Octo-Modell. Dieses Projekt überwindet effektiv die oben genannten Einschränkungen.
- Papieradresse: https://arxiv.org/pdf/2405.12213
- Open-Source-Projekte : https://octo-models.github.io/
- Sie haben ein System entwickelt, das es GRP ermöglicht, die Schnittstellendiversifizierungsprobleme nachgelagerter Roboteranwendungen einfacher zu bewältigen.
Der Kern des Modells ist die Transformer-Architektur, die beliebige Eingabe-Tokens (basierend auf Beobachtungen und Aufgaben erstellt) in Ausgabe-Tokens abbildet (die dann in Aktionen kodiert werden) und diese Architektur kann mit verschiedenen Roboter- und Aufgabendatensätzen verwendet werden Zug. Die Richtlinie kann ohne zusätzliche Schulung verschiedene Kamerakonfigurationen akzeptieren, verschiedene Roboter steuern und sich durch verbale Befehle oder Zielbilder leiten lassen – alles durch einfaches Ändern der in das Modell eingegebenen Token.
Am wichtigsten ist, dass sich das Modell auch an neue Roboterkonfigurationen mit unterschiedlichen Sensoreingängen, Betriebsräumen oder Robotermorphologien anpassen kann. Dazu ist lediglich die Übernahme eines geeigneten Adapters und die Verwendung eines kleinen Zieldomänendatensatzes und einer kleinen Menge erforderlich Berechnen Sie das Budget für die Feinabstimmung.
Darüber hinaus wurde Octo auch mit dem bisher größten Robotermanipulationsdatensatz vorab trainiert – 800.000 Roboterdemonstrationen aus dem Open X-Embodiment-Datensatz. Octo ist nicht nur das erste GRP, das effizient auf neue Beobachtungs- und Aktionsräume abgestimmt ist, es ist auch die erste generalistische Robotermanipulationsstrategie, die vollständig Open Source ist (Trainingsworkflow, Modellkontrollpunkte und Daten). Das Team hob in dem Papier auch den einzigartigen und innovativen Charakter seiner kombinierten Octo-Komponenten hervor.
Octo-Modell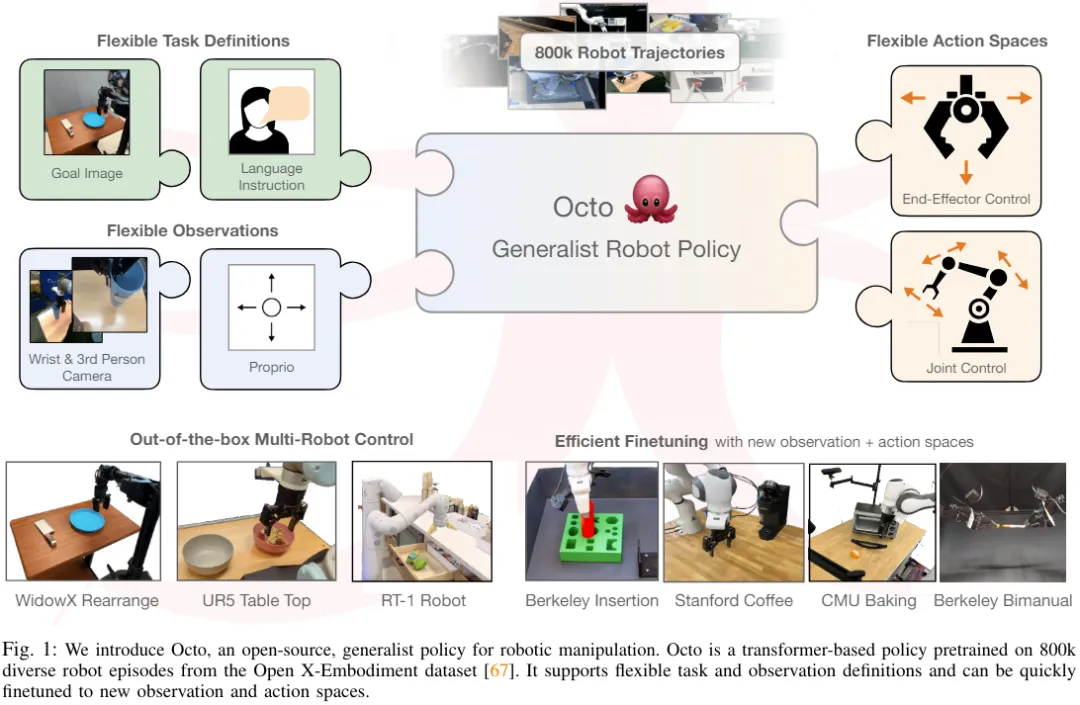
Werfen wir einen Blick darauf, wie Octo, eine Open-Source-Roboterstrategie für Generalisten, aufgebaut ist. Insgesamt ist Octo als flexible und breit anwendbare generalistische Robotikstrategie konzipiert, die von einer Reihe verschiedener nachgelagerter Robotikanwendungen und Forschungsprojekte genutzt werden kann.
Architektur
Der Kern von Octo basiert auf Transformers Strategie π. Es enthält drei Schlüsselteile: den Eingabe-Tokenizer, das Transformer-Backbone-Netzwerk und den Auslesekopf.
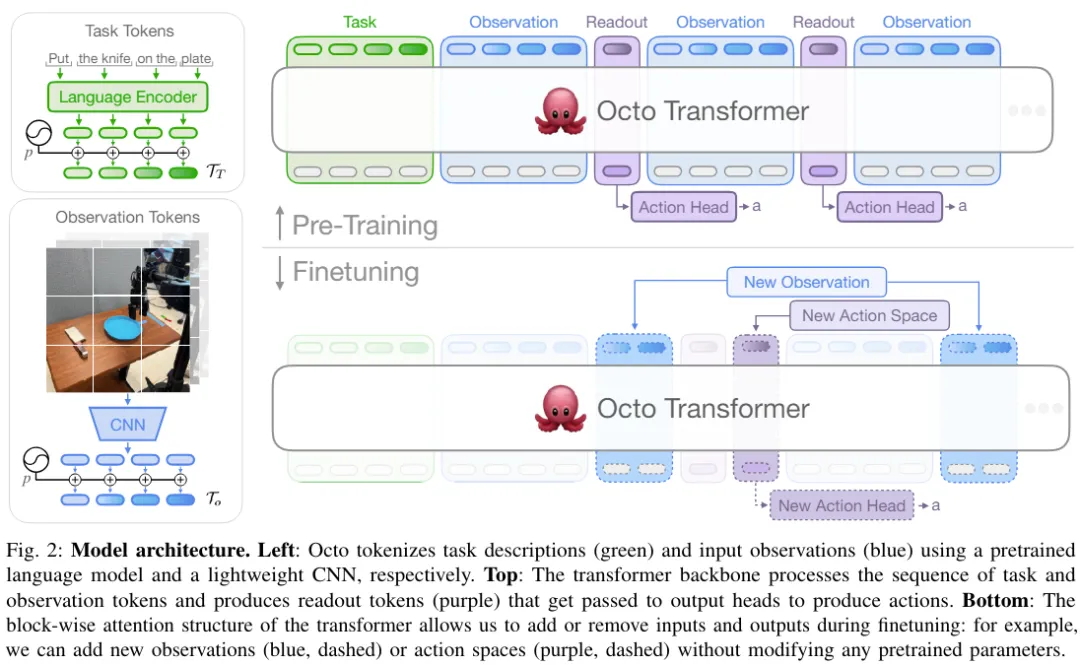
Wie in Abbildung 2 dargestellt, besteht die Funktion des Eingabe-Tokenizers darin, Sprachanweisungen, Ziele und Beobachtungssequenzen in Token umzuwandeln. Das Transformer-Backbone verarbeitet diese Token in Einbettungen und der Auslesekopf erhält die erforderliche Ausgabe. das heißt, Aktion. „Tokenizer für Aufgaben und Beobachtungen“ Tokenisierer:
 Für die Spracheingabe wird sie zuerst tokenisiert und dann durch einen vorab trainierten Transformer in eine Spracheinbettungs-Tokensequenz verarbeitet. Konkret verwendeten sie das Modell t5-base (111M).
Für die Spracheingabe wird sie zuerst tokenisiert und dann durch einen vorab trainierten Transformer in eine Spracheinbettungs-Tokensequenz verarbeitet. Konkret verwendeten sie das Modell t5-base (111M).
Für Bildbeobachtungen und Ziele werden sie durch einen flacheren Faltungsstapel verarbeitet und dann in eine Folge abgeflachter Kacheln aufgeteilt.
Abschließend wird die Eingabesequenz des Transformers erstellt, indem lernbare Positionseinbettungen zu Aufgaben- und Beobachtungs-Tokens hinzugefügt und in einer bestimmten Reihenfolge angeordnet werden.
Transformer-Rückgrat und Auslesekopf
Nachdem die Eingabe in eine einheitliche Token-Sequenz verarbeitet wurde, kann sie zur Verarbeitung an Transformer übergeben werden. Dies ähnelt früheren Forschungsarbeiten zum Training transformatorbasierter Richtlinien auf der Grundlage von Beobachtungen und Aktionssequenzen.
Octos Aufmerksamkeitsmodus ist die Block-für-Block-Maskierung: Beobachtungstoken können je nach Kausalzusammenhang nur auf Token und Aufgabentoken aus demselben oder einem vorherigen Zeitschritt achten. Token, die nicht vorhandenen Beobachtungen entsprechen, werden vollständig maskiert (z. B. Datensätze ohne Sprachanweisungen). Dieser modulare Aufbau erleichtert das Hinzufügen oder Entfernen von Beobachtungen oder Aufgaben während der Feinabstimmungsphase.
Zusätzlich zu diesen Eingabe-Token-Modulen fügte das Team auch gelernte Auslese-Token ein. Der Auslesetoken achtet auf seine vorherigen Beobachtungs- und Aufgabentoken, wird jedoch von keinem Beobachtungs- oder Aufgabentoken beachtet. Daher können Auslesetokens nur die interne Einbettung lesen und verarbeiten, aber keinen Einfluss auf die interne Einbettung haben. Der Auslesetoken verhält sich ähnlich wie der [CLS]-Token in BERT und fungiert als kompakte Vektoreinbettung der bisherigen Beobachtungssequenz. Für die Einbettung von Lese-Tokens wird ein leichter „Action-Header“ verwendet, der den Diffusionsprozess implementiert. Dieser Aktionsheader sagt einen „Block“ mehrerer aufeinanderfolgender Aktionen voraus.
Dieses Design ermöglicht es Benutzern, dem Modell während der nachgelagerten Feinabstimmung flexibel neue Aufgaben und Beobachtungseingabe- oder Aktionsausgabeheader hinzuzufügen. Beim nachgelagerten Hinzufügen neuer Aufgaben, Beobachtungen oder Verlustfunktionen können Sie die vorab trainierten Gewichte des Transformers als Ganzes beibehalten und nur neue Positionseinbettungen, einen neuen Lightweight-Encoder oder neue Header hinzufügen, die aufgrund von Spezifikationsparametern erforderlich sind. Dies unterscheidet sich von früheren Architekturen, die eine Neuinitialisierung oder Neuschulung zahlreicher Komponenten des vorab trainierten Modells erforderten, wenn Bildeingaben hinzugefügt oder entfernt oder Aufgabenspezifikationen geändert wurden.
Um Octo zu einem echten „generalistischen“ Modell zu machen, ist diese Flexibilität von entscheidender Bedeutung: Da es für uns unmöglich ist, alle möglichen Robotersensor- und Aktionskonfigurationen in der Vortrainingsphase abzudecken, können wir Octo im Fein- anpassen. Tuning-Stufe Sein Input und Output machen es zu einem vielseitigen Werkzeug für die Robotik-Community. Darüber hinaus haben frühere Modelldesigns, die ein Standard-Transformer-Backbone verwendeten oder einen visuellen Encoder mit einem MLP-Ausgabekopf fusionierten, die Art und Reihenfolge der Modelleingänge festgelegt. Im Gegensatz dazu erfordert der Wechsel von Octos Beobachtungen oder Aufgaben keine Neuinitialisierung eines Großteils des Modells.
Trainingsdaten
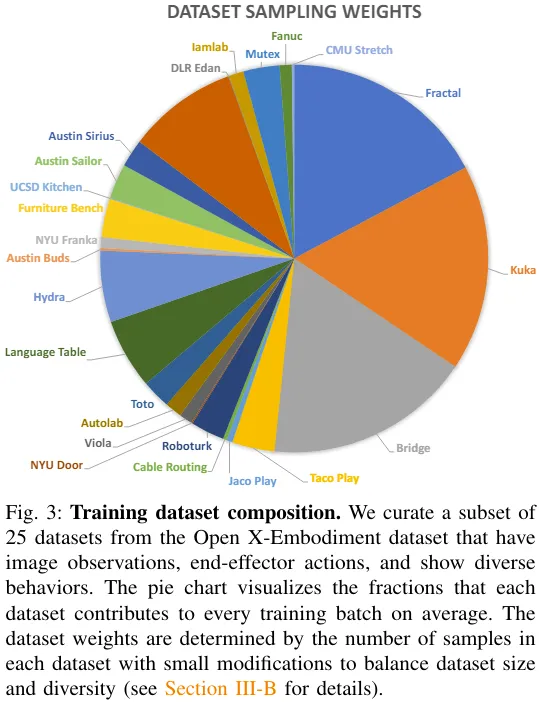
Das Team nahm einen gemischten Datensatz aus 25 Datensätzen von Open X-Embodiment. Abbildung 3 zeigt die Zusammensetzung des Datensatzes.
Weitere Einzelheiten zu den Trainingszielen und der Konfiguration der Trainingshardware finden Sie im Originalpapier.
Modellprüfpunkte und Code
Hier kommt es auf den Punkt! Das Team hat nicht nur Octos Artikel veröffentlicht, sondern auch alle Ressourcen vollständig als Open Source bereitgestellt, darunter:
- Vorab trainierte Octo-Checkpoints, einschließlich Octo-Small mit 27 Millionen Parametern und Octo-Base mit 93 Millionen Parametern.
- Feinabstimmungsskript für Octo-Modelle, basierend auf JAX.
- Modellieren Sie den Pre-Training-Workflow für Octo vor dem Training auf dem Open X-Embodiment-Datensatz, basierend auf JAX. Datenlader für Open X-Embodiment-Daten, kompatibel mit JAX und PyTorch.
Experiment
Das Team führte auch eine empirische Analyse von Octo durch Experimente durch und bewertete seine Leistung als grundlegendes Robotermodell in mehreren Dimensionen:
- Kann Octo direkt zur Steuerung mehrerer Roboter verwendet werden? Roboter Körper und lösen Sprach- und Zielaufgaben?
- Können Octo-Gewichte als gute Initialisierungsbasis dienen, um eine dateneffiziente Feinabstimmung für neue Aufgaben und Roboter zu unterstützen, und sind sie Trainingsmethoden von Grund auf und häufig verwendeten vorab trainierten Darstellungen überlegen?
- Welche Designentscheidung in Octo ist am wichtigsten, wenn es um die Entwicklung einer generalistischen Roboterstrategie geht?
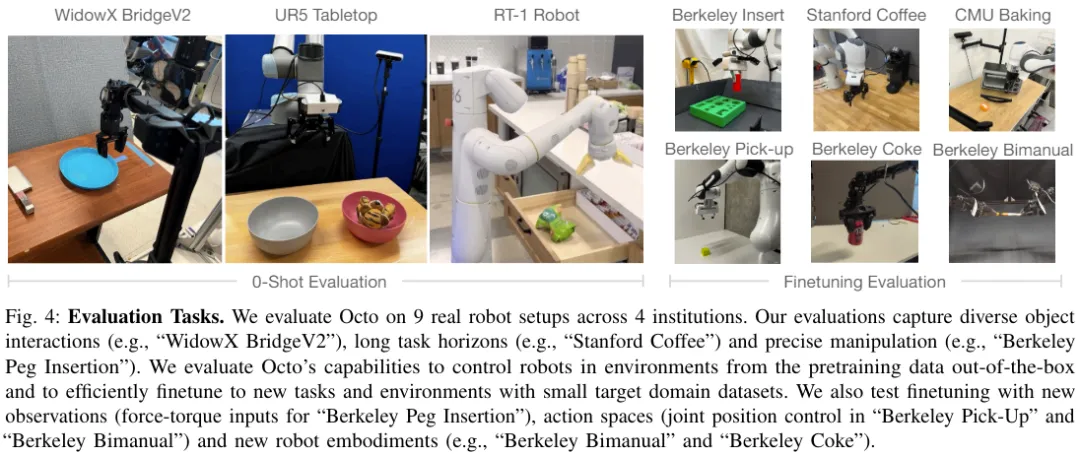
Abbildung 4 zeigt die 9 Aufgaben zur Bewertung von Octo.
Verwenden Sie Octo direkt, um mehrere Roboter zu steuern.
Das Team verglich die Nullproben-Steuerungsfähigkeiten von Octo, RT-1-X und RT-2-X. Die Ergebnisse sind in dargestellt Abbildung 5.
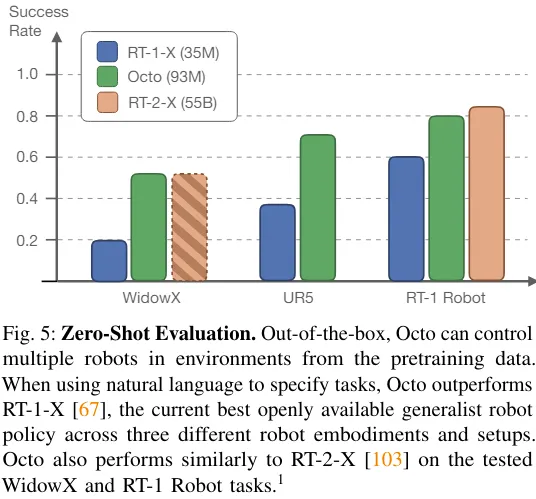
Es ist ersichtlich, dass die Erfolgsquote von Octo 29 % höher ist als die von RT-1-X (35 Millionen Parameter). In der WidowX- und RT-1-Robot-Bewertung entspricht die Leistung von Octo der von RT-2-X mit 55 Milliarden Parametern.
Darüber hinaus unterstützen RT-1-X und RT-2-X nur Sprachbefehle, während Octo auch bedingte Zielbilder unterstützt. Das Team stellte außerdem fest, dass die Erfolgsquote bei der WidowX-Aufgabe um 25 % höher war, wenn sie auf Zielbildern konditioniert wurde, als wenn sie auf Sprache konditioniert wurde. Dies kann daran liegen, dass Zielbilder mehr Informationen über die Aufgabenerledigung liefern.
Octo kann Daten effizient nutzen, um sich an neue Felder anzupassen
Tabelle 1 enthält die experimentellen Ergebnisse der dateneffizienten Feinabstimmung.

Sie können sehen, dass die Feinabstimmung von Octo bessere Ergebnisse liefert als ein Training von Grund auf oder ein Vortraining mit vorab trainierten VC-1-Gewichten. Über 6 Bewertungseinstellungen hinweg beträgt der durchschnittliche Vorsprung von Octo gegenüber dem Zweitplatzierten 52 %!
Und ich muss erwähnen: Bei all diesen Evaluierungsaufgaben waren die Rezepte und Hyperparameter, die bei der Feinabstimmung von Octo verwendet wurden, alle gleich, was zeigt, dass das Team eine sehr gute Standardkonfiguration gefunden hat.
Entwurfsentscheidungen für das allgemeine Roboterstrategietraining
Die obigen Ergebnisse zeigen, dass Octo tatsächlich als Zero-Shot-Multirobotersteuerung verwendet werden kann und auch als Initialisierungsbasis für die Feinabstimmung von Richtlinien verwendet werden kann . Als nächstes analysierte das Team die Auswirkungen verschiedener Designentscheidungen auf die Leistung der Octo-Strategie. Konkret konzentrieren sie sich auf die folgenden Aspekte: Modellarchitektur, Trainingsdaten, Trainingsziele und Modellgröße. Dazu führten sie Ablationsstudien durch.
Tabelle 2 enthält die Ergebnisse der Ablationsstudie zu Modellarchitektur, Trainingsdaten und Trainingszielen.
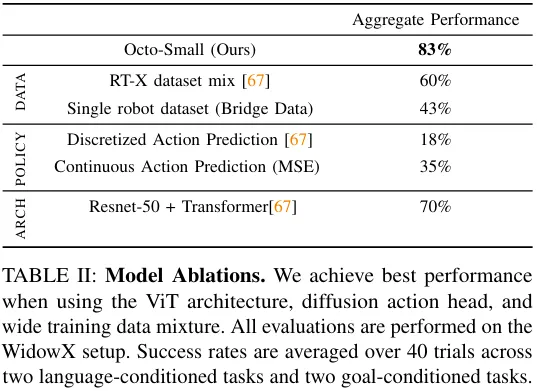
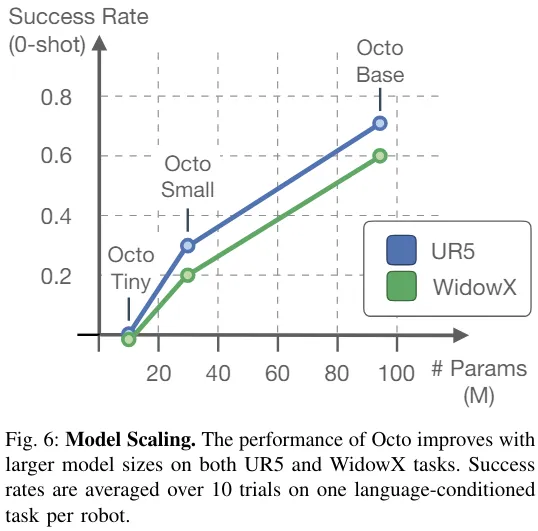
Abbildung 6 zeigt den Einfluss der Modellgröße auf die Erfolgsquote bei Nullstichproben. Es ist ersichtlich, dass größere Modelle über bessere visuelle Szenenwahrnehmungsfähigkeiten verfügen.
Insgesamt ist die Wirksamkeit der Octo-Komponenten nachgewiesen.
Das obige ist der detaillierte Inhalt vonDurch die Anpassung an verschiedene Formen und Aufgaben wurde das leistungsstärkste Open-Source-Roboter-Lernsystem „Octopus' geboren. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!

Heiße KI -Werkzeuge

Undresser.AI Undress
KI-gestützte App zum Erstellen realistischer Aktfotos

AI Clothes Remover
Online-KI-Tool zum Entfernen von Kleidung aus Fotos.

Undress AI Tool
Ausziehbilder kostenlos

Clothoff.io
KI-Kleiderentferner

Video Face Swap
Tauschen Sie Gesichter in jedem Video mühelos mit unserem völlig kostenlosen KI-Gesichtstausch-Tool aus!

Heißer Artikel
Heiße Werkzeuge

Notepad++7.3.1
Einfach zu bedienender und kostenloser Code-Editor

SublimeText3 chinesische Version
Chinesische Version, sehr einfach zu bedienen

Senden Sie Studio 13.0.1
Leistungsstarke integrierte PHP-Entwicklungsumgebung

Dreamweaver CS6
Visuelle Webentwicklungstools

SublimeText3 Mac-Version
Codebearbeitungssoftware auf Gottesniveau (SublimeText3)
Heiße Themen
 1662
1662
 14
1419
52
1312
25
1262
29
1235
24
14
1419
52
1312
25
1262
29
1235
24

 Open Source! Jenseits von ZoeDepth! DepthFM: Schnelle und genaue monokulare Tiefenschätzung!
Apr 03, 2024 pm 12:04 PM
Open Source! Jenseits von ZoeDepth! DepthFM: Schnelle und genaue monokulare Tiefenschätzung!
Apr 03, 2024 pm 12:04 PM
0.Was bewirkt dieser Artikel? Wir schlagen DepthFM vor: ein vielseitiges und schnelles generatives monokulares Tiefenschätzungsmodell auf dem neuesten Stand der Technik. Zusätzlich zu herkömmlichen Tiefenschätzungsaufgaben demonstriert DepthFM auch hochmoderne Fähigkeiten bei nachgelagerten Aufgaben wie dem Tiefen-Inpainting. DepthFM ist effizient und kann Tiefenkarten innerhalb weniger Inferenzschritte synthetisieren. Lassen Sie uns diese Arbeit gemeinsam lesen ~ 1. Titel der Papierinformationen: DepthFM: FastMonocularDepthEstimationwithFlowMatching Autor: MingGui, JohannesS.Fischer, UlrichPrestel, PingchuanMa, Dmytr
 Das weltweit leistungsstärkste Open-Source-MoE-Modell ist da, mit chinesischen Fähigkeiten, die mit GPT-4 vergleichbar sind, und der Preis beträgt nur fast ein Prozent von GPT-4-Turbo
May 07, 2024 pm 04:13 PM
Das weltweit leistungsstärkste Open-Source-MoE-Modell ist da, mit chinesischen Fähigkeiten, die mit GPT-4 vergleichbar sind, und der Preis beträgt nur fast ein Prozent von GPT-4-Turbo
May 07, 2024 pm 04:13 PM
Stellen Sie sich ein Modell der künstlichen Intelligenz vor, das nicht nur die Fähigkeit besitzt, die traditionelle Datenverarbeitung zu übertreffen, sondern auch eine effizientere Leistung zu geringeren Kosten erzielt. Dies ist keine Science-Fiction, DeepSeek-V2[1], das weltweit leistungsstärkste Open-Source-MoE-Modell, ist da. DeepSeek-V2 ist ein leistungsstarkes MoE-Sprachmodell (Mix of Experts) mit den Merkmalen eines wirtschaftlichen Trainings und einer effizienten Inferenz. Es besteht aus 236B Parametern, von denen 21B zur Aktivierung jedes Markers verwendet werden. Im Vergleich zu DeepSeek67B bietet DeepSeek-V2 eine stärkere Leistung, spart gleichzeitig 42,5 % der Trainingskosten, reduziert den KV-Cache um 93,3 % und erhöht den maximalen Generierungsdurchsatz auf das 5,76-fache. DeepSeek ist ein Unternehmen, das sich mit allgemeiner künstlicher Intelligenz beschäftigt
 KI untergräbt die mathematische Forschung! Der Gewinner der Fields-Medaille und der chinesisch-amerikanische Mathematiker führten 11 hochrangige Arbeiten an | Gefällt mir bei Terence Tao
Apr 09, 2024 am 11:52 AM
KI untergräbt die mathematische Forschung! Der Gewinner der Fields-Medaille und der chinesisch-amerikanische Mathematiker führten 11 hochrangige Arbeiten an | Gefällt mir bei Terence Tao
Apr 09, 2024 am 11:52 AM
KI verändert tatsächlich die Mathematik. Vor kurzem hat Tao Zhexuan, der diesem Thema große Aufmerksamkeit gewidmet hat, die neueste Ausgabe des „Bulletin of the American Mathematical Society“ (Bulletin der American Mathematical Society) weitergeleitet. Zum Thema „Werden Maschinen die Mathematik verändern?“ äußerten viele Mathematiker ihre Meinung. Der gesamte Prozess war voller Funken, knallhart und aufregend. Der Autor verfügt über eine starke Besetzung, darunter der Fields-Medaillengewinner Akshay Venkatesh, der chinesische Mathematiker Zheng Lejun, der NYU-Informatiker Ernest Davis und viele andere bekannte Wissenschaftler der Branche. Die Welt der KI hat sich dramatisch verändert. Viele dieser Artikel wurden vor einem Jahr eingereicht.
 Hallo, elektrischer Atlas! Der Boston Dynamics-Roboter erwacht wieder zum Leben, seltsame 180-Grad-Bewegungen machen Musk Angst
Apr 18, 2024 pm 07:58 PM
Hallo, elektrischer Atlas! Der Boston Dynamics-Roboter erwacht wieder zum Leben, seltsame 180-Grad-Bewegungen machen Musk Angst
Apr 18, 2024 pm 07:58 PM
Boston Dynamics Atlas tritt offiziell in die Ära der Elektroroboter ein! Gestern hat sich der hydraulische Atlas einfach „unter Tränen“ von der Bühne der Geschichte zurückgezogen. Heute gab Boston Dynamics bekannt, dass der elektrische Atlas im Einsatz ist. Es scheint, dass Boston Dynamics im Bereich kommerzieller humanoider Roboter entschlossen ist, mit Tesla zu konkurrieren. Nach der Veröffentlichung des neuen Videos wurde es innerhalb von nur zehn Stunden bereits von mehr als einer Million Menschen angesehen. Die alten Leute gehen und neue Rollen entstehen. Das ist eine historische Notwendigkeit. Es besteht kein Zweifel, dass dieses Jahr das explosive Jahr der humanoiden Roboter ist. Netizens kommentierten: Die Weiterentwicklung der Roboter hat dazu geführt, dass die diesjährige Eröffnungsfeier wie Menschen aussieht, und der Freiheitsgrad ist weitaus größer als der von Menschen. Aber ist das wirklich kein Horrorfilm? Zu Beginn des Videos liegt Atlas ruhig auf dem Boden, scheinbar auf dem Rücken. Was folgt, ist atemberaubend
 KAN, das MLP ersetzt, wurde durch Open-Source-Projekte auf Faltung erweitert
Jun 01, 2024 pm 10:03 PM
KAN, das MLP ersetzt, wurde durch Open-Source-Projekte auf Faltung erweitert
Jun 01, 2024 pm 10:03 PM
Anfang dieses Monats schlugen Forscher des MIT und anderer Institutionen eine vielversprechende Alternative zu MLP vor – KAN. KAN übertrifft MLP in Bezug auf Genauigkeit und Interpretierbarkeit. Und es kann MLP, das mit einer größeren Anzahl von Parametern ausgeführt wird, mit einer sehr kleinen Anzahl von Parametern übertreffen. Beispielsweise gaben die Autoren an, dass sie KAN nutzten, um die Ergebnisse von DeepMind mit einem kleineren Netzwerk und einem höheren Automatisierungsgrad zu reproduzieren. Konkret verfügt DeepMinds MLP über etwa 300.000 Parameter, während KAN nur etwa 200 Parameter hat. KAN hat eine starke mathematische Grundlage wie MLP und basiert auf dem universellen Approximationssatz, während KAN auf dem Kolmogorov-Arnold-Darstellungssatz basiert. Wie in der folgenden Abbildung gezeigt, hat KAN
 Tesla-Roboter arbeiten in Fabriken, Musk: Der Freiheitsgrad der Hände wird dieses Jahr 22 erreichen!
May 06, 2024 pm 04:13 PM
Tesla-Roboter arbeiten in Fabriken, Musk: Der Freiheitsgrad der Hände wird dieses Jahr 22 erreichen!
May 06, 2024 pm 04:13 PM
Das neueste Video von Teslas Roboter Optimus ist veröffentlicht und er kann bereits in der Fabrik arbeiten. Bei normaler Geschwindigkeit sortiert es Batterien (Teslas 4680-Batterien) so: Der Beamte hat auch veröffentlicht, wie es bei 20-facher Geschwindigkeit aussieht – auf einer kleinen „Workstation“, pflücken und pflücken und pflücken: Dieses Mal wird es freigegeben. Eines der Highlights Der Vorteil des Videos besteht darin, dass Optimus diese Arbeit in der Fabrik völlig autonom und ohne menschliches Eingreifen während des gesamten Prozesses erledigt. Und aus Sicht von Optimus kann es auch die krumme Batterie aufnehmen und platzieren, wobei der Schwerpunkt auf der automatischen Fehlerkorrektur liegt: In Bezug auf die Hand von Optimus gab der NVIDIA-Wissenschaftler Jim Fan eine hohe Bewertung ab: Die Hand von Optimus ist der fünffingrige Roboter der Welt am geschicktesten. Seine Hände sind nicht nur taktil
 Die Kuaishou-Version von Sora „Ke Ling' steht zum Testen offen: Sie generiert über 120 Sekunden Videos, versteht die Physik besser und kann komplexe Bewegungen genau modellieren
Jun 11, 2024 am 09:51 AM
Die Kuaishou-Version von Sora „Ke Ling' steht zum Testen offen: Sie generiert über 120 Sekunden Videos, versteht die Physik besser und kann komplexe Bewegungen genau modellieren
Jun 11, 2024 am 09:51 AM
Was? Wird Zootopia durch heimische KI in die Realität umgesetzt? Zusammen mit dem Video wird ein neues groß angelegtes inländisches Videogenerationsmodell namens „Keling“ vorgestellt. Sora geht einen ähnlichen technischen Weg und kombiniert eine Reihe selbst entwickelter technologischer Innovationen, um Videos zu produzieren, die nicht nur große und vernünftige Bewegungen aufweisen, sondern auch die Eigenschaften der physischen Welt simulieren und über starke konzeptionelle Kombinationsfähigkeiten und Vorstellungskraft verfügen. Den Daten zufolge unterstützt Keling die Erstellung ultralanger Videos von bis zu 2 Minuten mit 30 Bildern pro Sekunde, mit Auflösungen von bis zu 1080p und unterstützt mehrere Seitenverhältnisse. Ein weiterer wichtiger Punkt ist, dass es sich bei Keling nicht um eine vom Labor veröffentlichte Demo oder Video-Ergebnisdemonstration handelt, sondern um eine Anwendung auf Produktebene, die von Kuaishou, einem führenden Anbieter im Bereich Kurzvideos, gestartet wurde. Darüber hinaus liegt das Hauptaugenmerk darauf, pragmatisch zu sein, keine Blankoschecks auszustellen und sofort nach der Veröffentlichung online zu gehen. Das große Modell von Ke Ling wurde bereits in Kuaiying veröffentlicht.
 Das Neueste von der Universität Oxford! Mickey: 2D-Bildabgleich in 3D SOTA! (CVPR\'24)
Apr 23, 2024 pm 01:20 PM
Das Neueste von der Universität Oxford! Mickey: 2D-Bildabgleich in 3D SOTA! (CVPR\'24)
Apr 23, 2024 pm 01:20 PM
Projektlink vorne geschrieben: https://nianticlabs.github.io/mickey/ Anhand zweier Bilder kann die Kameraposition zwischen ihnen geschätzt werden, indem die Korrespondenz zwischen den Bildern hergestellt wird. Normalerweise handelt es sich bei diesen Entsprechungen um 2D-zu-2D-Entsprechungen, und unsere geschätzten Posen sind maßstabsunabhängig. Einige Anwendungen, wie z. B. Instant Augmented Reality jederzeit und überall, erfordern eine Posenschätzung von Skalenmetriken und sind daher auf externe Tiefenschätzer angewiesen, um die Skalierung wiederherzustellen. In diesem Artikel wird MicKey vorgeschlagen, ein Keypoint-Matching-Prozess, mit dem metrische Korrespondenzen im 3D-Kameraraum vorhergesagt werden können. Durch das Erlernen des 3D-Koordinatenabgleichs zwischen Bildern können wir auf metrische Relativwerte schließen
